Содержание
Регулирование частоты вращения асинхронного двигателя изменением скольжения
Регулирование частоты вращения асинхронного двигателя изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения в соответствии с формулами (32), (34) изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании. Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку.
При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется. Для регулирования частоты вращения асинхронного двигателя уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя (рис. 28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
Рис. 28. Механические характеристики асинхронных двигателей при различных значениях первичного напряжения: а — двигатель нормального исполнения; б — двигатель с повышенным скольжением
Этот метод регулирования частоты вращения асинхронного двигателя применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления для увеличения sкр.
В связи с пониженным КПД и трудностями регулирования напряжения рассматриваемый метод применяется только для двигателей относительно малой мощности. При этом для регулирования U1 можно использовать регулируемые автотрансформаторы или резисторы, включенные последовательно в первичную цепь, а также реакторы насыщения, регулируемые путем подмагничивания постоянным током (магнитные усилители). При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
Кроме магнитных усилителей применяются также управляемые и полууправляемые полупроводниковые регуляторы напряжения, также позволяющие в широком диапазоне регулировать приложенное напряжение и осуществлять автоматическое регулирование частоты вращения двигателя.
Частным случаем рассмотренного способа является импульсное регулирование частоты вращения, при котором асинхронный двигатель периодически подключается к сети и отключается от нее. При этом двигатель постоянно находится в переходном режиме ускорения (подключен к сети) или торможения (отключен от сети). Подбирая соотношение времени включения ко времени отсутствия питания, можно регулировать среднюю частоту вращения двигателя в широком диапазоне.
При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента Мmах (см. рис. 22). Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Если асинхронный двигатель работает с некоторым приводимым механизмом на валу со статическим моментом сопротивления Мс (см. рис. 22), то на естественной характеристике установившемуся режиму его работы будет соответствовать точка 1. При введении добавочных сопротивлений — резисторов Rд1 — Rд3 — в цепь ротора произойдет соответствующий переход двигателя в новые режимы работы с меньшими частотами вращения: n1>n2>n3>n4. Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Работа двигателя на естественной характеристике в данном случае будет наиболее стабильной и устойчивой. Это означает, что при изменении момента сопротивления Мс в процессе работы производственного механизма отклонения частоты вращения двигателя будут минимальными.
Технические показатели данного способа регулирования следующие:
- диапазон регулирования сравнительно небольшой — порядка 2 : 1 и ограничивается вероятностью нестабильности работы двигателя при больших значениях сопротивлений резисторов Rд;
- плавность регулирования при реостатном регулировании небольшая и определяется числом ступеней регулирования. Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
Кроме реостатного регулирования применяется регулирование частоты вращения путем введения добавочной ЭДС в обмотку ротора асинхронного двигателя.
Регулирование частоты вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения Ps= sPэм, большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом КПД установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам ротора двигателя приемник электрической энергии в виде вспомогательной электрической машины. Эта машина должна работать в режиме двигателя, обеспечивая требуемое напряжение на своих зажимах (и соответственно на контактных кольцах самого асинхронного двигателя).
Поясним, как влияет на работу асинхронного двигателя введение добавочной ЭДС Eд в обмотку ротора, при условии, что частота Eд всегда равна частоте токов ротора f2 = sf1.
Пусть в отсутствие ЭДС Eд по цепи ротора протекает ток I2, определяемый в соответствии с формулой (25) как I2=sE2/(r2+jsx2). Этот ток, взаимодействуя с полем обмотки статора, создает электромагнитный момент М, численно равный моменту сопротивления нагрузки Мс, так что двигатель работает при некоторой частоте вращения n.
Если теперь во вторичную цепь ввести ЭДС Eд встречно ЭДС скольжения E2s в этой же цепи, то вторичный ток
(56)
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s увеличиваться. При этом согласно равенству (56) ток I2, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов на валу: М=Мс. Двигатель при этом будет работать с увеличенным скольжением s. Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Предположим теперь, что ЭДС Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с ЭДС sE2. Тогда вместо (56) получаем
(57)
В первый момент после введения ЭДС Eд ток I2 и момент М возрастут, асинхронный двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток I2, создаваемый в этом случае только за счет действия Eд, все еще будет велик по сравнению с током, необходимым для создания момента М=Mс, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и ЭДС E2s при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока в соответствии с выражением (57) ток не упадет до необходимой величины. При s<0 угол отрицательный (см. векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
Таким образом, с помощью добавочной ЭДС Eд путем изменения ее значения и направления можно осуществить плавное двухзонное регулирование частоты вращения двигателя ниже и выше синхронной.
Реализация этого весьма экономичного способа регулирования частоты вращения сопряжена с усложнением схемы регулирования и требует применения электромеханического (электромашинного) или вентильного каскада для преобразования выделяемой при регулировании мощности потерь скольжения в полезную электрическую или механическую мощность. Каскадные установки выполняются на мощности до тысяч киловатт с диапазоном регулирования частоты вращения порядка 3 : 1.
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
- Подробности
- Категория: Учеба
- электродвигатель
- электроснабжение
- сооружения
- оборудование
- подстанции
- обучение
- приборы
- среднее напряжение
Содержание материала
- Электротехника и электрооборудование
- Счетчики электрической энергии
- Мегомметры
- Измерение неэлектрических
- Асинхронные двигатели
- Пуск асинхронных двигателей
- Регулирование скорости асинхронных
- Данные асинхронных двигателей
- Синхронные машины
- Передвижные электростанции
- Синхронные электродвигатели
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Электропривод генератор-двигатель
- Трансформаторы
- Конструкция трансформаторов до 10
- Данные трансформаторов до 10
- Специальные трансформаторы
- Измерительные трансформаторы
- Аппаратура управления и защиты
- Аппаратура автоматическая
- Реле защиты и управления
- Логические элементы
- Электропривод на строительстве
- Выбор электродвигателя
- Схемы электроприводы
- Электропривод строительных
- Сварочное электрооборудование
- Электрическое освещение
- Устройство освещения
- Нормы освещенности
- Электрические сети строительные
- Аппаратура подстанций
- Электрические сети
- Устройство электрических сетей
- Выбор сечения проводов
- Безопасность обслуживания
- Защитное заземление
Страница 7 из 39
Регулирование скорости вращения асинхронных двигателей производят несколькими способами. Формула скорости вращения асинхронных двигателей:
Формула скорости вращения асинхронных двигателей:
(7.7) где s — скольжение в долях единицы показывает, что скорость вращения может регулироваться изменением частоты тока f, числа пар полюсов р и скольжения s.
Регулирование скорости вращения изменением величины скольжения асинхронного электродвигателя возможно двумя способами:
- введением в цепь ротора дополнительного сопротивления, что возможно для двигателей с фазным ротором;
- изменением реактивных сопротивлений (дросселей насыщения), включаемых в обмотку статора.
Регулирование скорости асинхронных электродвигателей с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшать его скорость практически не более чем на 40—50% номинальной скорости.
При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, т. е. уменьшается число оборотов двигателя. В этом случае схема регулирования сходна со схемой пуска асинхронного электродвигателя с фазным ротором (см. рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
Описанный способ регулирования асинхронных электродвигателей с фазным ротором применяется в тех случаях, когда работа электродвигателя с пониженной скоростью непродолжительна и когда не требуется большой точности регулирования, например для регулирования скорости движения механизмов подъемно-транспортных установок.
Регулирование скорости асинхронных электродвигателей при помощи дросселей насыщения состоит в том, что в цепь статора электродвигателя включаются реактивные сопротивления с переменной индуктивностью. Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменяемое индуктивное сопротивление в цепи статора электродвигателя позволяет получать на зажимах машины различное напряжение (рис. 7.13, б), чем достигается изменение скольжения, т. е. скорости вращения ротора. Достоинством описанного способа является плавное регулирование скорости вращения электродвигателя; недостатками — значительное уменьшение максимального вращающего момента, а также уменьшение коэффициента мощности и к. п. д. электродвигателя.
Регулирование скорости вращения асинхронного электродвигателя за счет изменения числа пар полюсов осуществляется переключением обмотки статора и является ступенчатым. Для этих целей применяют специальные асинхронные многоскоростные электродвигатели, выпускаемые промышленностью и рассчитанные на 2, 3 и 4 скорости. Так, например, четырех скорости ой электродвигатель может иметь синхронные скорости вращения 500, 750, 1000 и 1500 об/мин.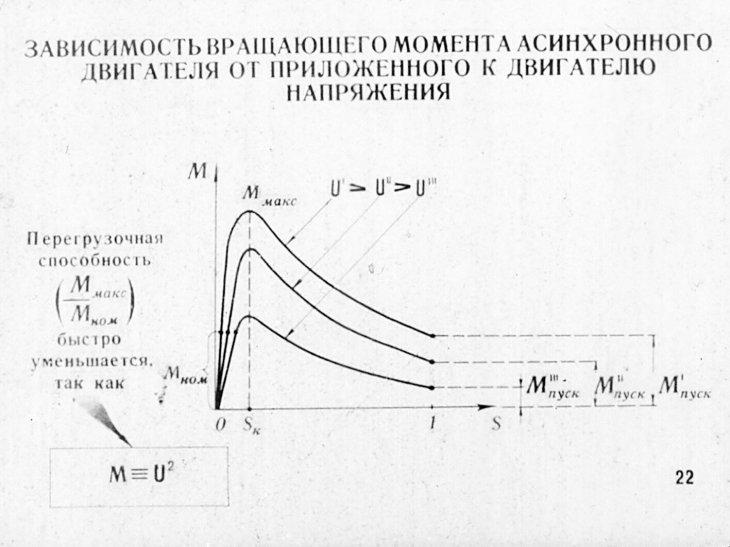
Рис. 7.13. Схема включения и регулирования скорости асинхронных двигателей с короткозамкнутым ротором при помощи дросселей насыщения:
а — схема включения; б — механические характеристики
Рис. 7.14. Переключение проводов для изменения направления вращения асинхронного двигателя
Изменение числа пар полюсов достигают наиболее простым способом при устройстве двух независимых обмоток на статоре асинхронного электродвигателя. Такие электродвигатели выпускают с синхронными скоростями вращения 1000/1500 об/мин.
Двухскоростные электродвигатели имеют шесть, трехскоростные— девять и четырехскоростные — двенадцать выводов к переключателю полюсов.
Регулирование скорости вращения асинхронного электродвигателя изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой. Этот способ еще не нашел применения для регулирования скорости электроприводов строительных машин, но является весьма перспективным при использовании для статических преобразователей частоты управляемых, полупроводниковых вентилей-тиристоров, производство которых в настоящее время развивается (о тиристорах см. гл. 10).
гл. 10).
Изменение направления вращения асинхронного двигателя — реверсирование достигается изменением направления вращения магнитного
поля. Для этого достаточно переключить любые два провода трехфазной системы, подводящие ток к статору двигателя. На рис. 7.14 приведена схема такого переключения. При переключении трех проводов направление вращения магнитного поля статора, а следовательно, и ротора двигателя не изменится.
§ 7.9. Потери энергии и коэффициент полезного действия асинхронных электродвигателей. Коэффициент мощности двигателей
Электрическая энергия, расходуемая при работе асинхронного электродвигателя, затрачивается на полезную механическую работу и на покрытие потерь: электрических, магнитных и механических.
Потери в меди или электрические потери обусловлены нагреванием обмоток статора и ротора при протекании по ним тока. Потери в стали (магнитные потери) состоят из потерь на вихревые токи и на перемагничивание в стальных частях статора и ротора. Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Механические потери состоят из расхода энергии на трение в подшипниках, трение ротора о воздух и воздуха в вентиляционной системе электродвигателя. Эти потери зависят от скорости вращения ротора, его диаметра, типа подшипников и конструкции вентиляционной системы двигателя.
Коэффициентом полезного действия (к. п. д.) двигателя называют отношение полезной механической мощности Р3 на валу двигателя к затраченной мощности, потребляемой из сети P1
(7-8)
Так как разница между затраченной и полезной мощностью равна потерям, то формулу получения к. п. д. двигателя можно записать в следующем виде:
(7.9)
где рм — потери в меди или электрические потери; рс — потери в стали или магнитные потери;
Рмех — механические потери.
Потери в меди являются переменными, зависящими от нагрузки, вследствие того что с увеличением тока увеличивается назревание обмоток.
Потери в стали (магнитные) и механические потери являются постоянными, так как не зависят от нагрузки.
Коэффициент полезного действия двигателя изменяется в зависимости от нагрузки.
Наибольшей величины к. п. д. достигает при нагрузке, равной примерно 0,75 номинальной, а затем с увеличением нагрузки к. п. д. уменьшается вследствие увеличения электрических потерь на нагревание обмоток (рис. 7.15, а).
Большое магнитное сопротивление воздушного зазора между статором и ротором асинхронного двигателя приводит к значительной величине намагничивающего (реактивного) тока, составляющего примерно 0,4—0,7 от номинальной силы тока электродвигателя. В связи с этим двигатель всегда работает с cos φ, меньшим единицы. При полной нагрузке коэффициент мощности cos φ двигателей достигает максимальной величины 0,8—0,9 (рис. 7.15, б).
Рис. 7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
С уменьшением нагрузки коэффициент мощности снижается, что объясняется малой зависимостью от нагрузки намагничивающего (реактивного) тока. Сила тока двигателя складывается из двух величин: активного тока, зависящего от нагрузки, и реактивного тока, независимого от нагрузки. Поэтому при механической недогрузке активный ток уменьшается и, следовательно, увеличивается относительная величина реактивного тока, что приводит к снижению коэффициента мощности cos φ.
- Назад
- Вперёд
- Назад
- Вы здесь:
- Главная
- Книги
- Учеба
 org/ListItem»> Конструирование низковольтной аппаратуры
org/ListItem»> Конструирование низковольтной аппаратуры
Еще по теме:
- В помощь сельскому электромонтеру
- Электроснабжение в строительстве
- Электромонтер строительной площадки
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Электрические аппараты и оборудование выше 1000В
Почему скорость вращения двигателя может изменяться?
об/мин: единица измерения скорости вращения двигателя, количество оборотов в минуту, также может быть выражено в об/мин.
Например: 2-полюсный двигатель 50 Гц 3000 об/мин, 4-полюсный двигатель 50 Гц 1500 об/мин
Вывод: Скорость вращения двигателя пропорциональна частоте
Здесь двигатель представляет собой асинхронный двигатель переменного тока, который используется в большинстве отраслей промышленности. Скорость вращения асинхронного двигателя переменного тока приблизительна и зависит от полюсов и частоты двигателя. Как известно, полюса двигателя постоянны. Поскольку число полюсов двигателя не является непрерывным (например, кратным 2, количество полюсов равно 2, 4, 6), изменение этого значения для регулировки скорости двигателя нецелесообразно.
Как известно, полюса двигателя постоянны. Поскольку число полюсов двигателя не является непрерывным (например, кратным 2, количество полюсов равно 2, 4, 6), изменение этого значения для регулировки скорости двигателя нецелесообразно.
Частоту можно отрегулировать перед подачей питания на двигатель переменного тока, после чего можно свободно регулировать скорость вращения двигателя. Поэтому преобразователь частоты является предпочтительным устройством для управления скоростью двигателя.
п = 60ф/р
n: синхронная скорость
f: частота сети
p: количество полюсов
Вывод: изменение частоты и напряжения является лучшим методом управления двигателем.
Но если просто изменить частоту без изменения напряжения, то при снижении частоты возникнет перенапряжение (перевозбуждение), что может привести к повреждению двигателя переменного тока. Таким образом, напряжение должно быть изменено, когда преобразователь частоты выдает другую частоту. Если выходная частота инвертора превышает номинальную частоту, напряжение не может продолжать увеличиваться, максимальное напряжение может равняться только номинальному напряжению двигателя.
Если выходная частота инвертора превышает номинальную частоту, напряжение не может продолжать увеличиваться, максимальное напряжение может равняться только номинальному напряжению двигателя.
Например: Чтобы уменьшить скорость вращения двигателя наполовину, выходная частота инвертора изменится с 50 Гц на 25 Гц, тогда выходное напряжение инвертора должно измениться с 400 В до примерно 200 В.
Что такое импульсное сопротивление нагрузки?
Импедансная нагрузка (SIL) линии — это силовая нагрузка, при которой полезная реактивная мощность равна нулю. Итак, если ваша линия передачи хочет «поглощать» реактивную мощность, SIL — это количество реактивной мощности …
СИЗ (средства индивидуальной защиты)
Требования к СИЗ (средствам индивидуальной защиты) для работы с электрическим оборудованием, находящимся под напряжением, делают ввод в эксплуатацию, запуск и настройку электрических систем управления неудобными и громоздкими. Мы в …
Мы в …
Выбираем двигатели для электромобилей
Мой опыт работы с типами двигателей в электромобилях следующий. Существует три варианта двигателей для электромобилей: двигатели с постоянными магнитами, интегральные двигатели с постоянными магнитами и асинхронные двигатели с постоянными магнитами. Каждый из них …
Испытания автоматических выключателей
Для небольших автоматических выключателей мы можем провести проверку поведения магнитной защиты с помощью «аппарата подачи тока», и предположим, что результаты выключателя были хорошими, как вы думаете, этого достаточно? Я точно нет, потому что по…
Измените 230 В на 460 В для работы электродвигателя.
У меня есть генератор мощностью 3 л.с., и он выдает 230 В, и у меня есть погружной электронасос, двигатель которого рассчитан на работу при 460 В. Могу ли я использовать повышающий трансформатор для увеличения выходного напряжения от моего . ..
..
Методы управления скоростью асинхронного двигателя
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
В этой статье мы подробно рассмотрели методы управления скоростью асинхронного двигателя вместе с их принципиальными схемами:
Управление скоростью путем изменения числа полюсов
Управление скоростью путем изменения частоты
Управление скоростью по методу Крамера
Электронное управление частотой
Крутящий момент создается в асинхронном двигателе за счет взаимодействия двух магнитных полей. Первое вращающееся магнитное поле создается токами, протекающими в обмотках статора. Это вращающееся поле разрезает проводники в роторе и индуцирует в них напряжение. Напряжение ротора вызывает протекание тока в роторе и создает второе магнитное поле.
Два магнитных поля взаимодействуют друг с другом и заставляют ротор вращаться в направлении вращения поля статора. Он разгоняется примерно до 96 % скорости вращения поля статора. Эта 4-процентная разница в скорости при полной нагрузке является скоростью проскальзывания. Без скольжения асинхронный двигатель не может развивать крутящий момент.
Эта 4-процентная разница в скорости при полной нагрузке является скоростью проскальзывания. Без скольжения асинхронный двигатель не может развивать крутящий момент.
Скорость асинхронного двигателя всегда определяется вращающимся магнитным полем в статоре. Это поле статора всегда вращается с синхронной скоростью, определяемой двумя факторами:
1. Количество пар полюсов
2. Частота приложенного напряжения.
Синхронную скорость можно найти по формуле:
Число 120 получается из произведения количества секунд в минуте и того факта, что магнитные полюса всегда идут парами. Две другие величины называются переменными.
Важно отметить, что есть только две переменные.
При увеличении частоты скорость увеличивается:
Если число полюсов увеличивается, скорость уменьшается:
Эти два основных принципа являются единственными факторами, которые могут повлиять на изменение скорости асинхронного двигателя, хотя методы, принятые для достижения этого, многие.
Управление скоростью путем изменения числа полюсов
Изменение числа полюсов в обмотке статора всегда связано с резким скачком от одной скорости к другой. При питании с частотой 50 Гц двухполюсный асинхронный двигатель будет вращаться со скоростью 3000 об/мин (без учета скорости скольжения). Если заменить четырехполюсный статор, скорость быстро изменится до 1500 об/мин.
Изменение скорости может передавать незначительные переходные процессы в линии питания. В больших асинхронных двигателях следует вводить короткую выдержку времени при переключении с одной обмотки на другую.
Наиболее распространенный метод заключается в разработке обмоток, которые могут быть соединены между собой для изменения числа полюсов. Это всегда соотношение 1:2, то есть двухполюсная обмотка преобразуется в четырехполюсную, четырехполюсная — в восьмиполюсную и т. д.
На рис. 1(a) показаны принцип и соединения, необходимые для преобразования четырехполюсного в восьмиполюсное. Рисуется только одна фаза; маленькие прямоугольники используются для обозначения групп полюсов и фаз, а стрелки указывают направление намотки. Необходимо, чтобы обмотки полюсов были соединены попарно друг напротив друга, как показано на рисунке.
Рисуется только одна фаза; маленькие прямоугольники используются для обозначения групп полюсов и фаз, а стрелки указывают направление намотки. Необходимо, чтобы обмотки полюсов были соединены попарно друг напротив друга, как показано на рисунке.
Рисунок 1 Последовательно-параллельное соединение двухскоростного асинхронного двигателя
Обратите внимание, что центральный отвод ( T A ) обмотки выведен наружу, чтобы к нему был доступ снаружи. В Рисунок 1 (b), четыре полюсно-фазные обмотки были перерисованы в виде вертикальной линии. Если A 1 и A 2 соединены перемычкой и подключены к линии L 2 , а центральный ответвитель T A подключен к линии L 1 , двигатель будет иметь четыре обычных полюса, как показано стрелками.
В Рисунок 1(c) мост был удален. A 1 повторно подключается к линии L 1 , а A 2 остается подключенной к линии L 2 . Как показано стрелками, ток течет последовательно через все четыре группы полюсов, и все они имеют одинаковую полярность, например, как показано, будет четыре северных полюса.
Как показано стрелками, ток течет последовательно через все четыре группы полюсов, и все они имеют одинаковую полярность, например, как показано, будет четыре северных полюса.
Магнитный поток отклоняется в статоре и выходит между северными полюсами, как показано пунктирными линиями. Результирующая магнитная цепь асинхронного двигателя представляет собой магнитную цепь восьмиполюсной машины.
Чтобы обойти это ограничение соотношения 1:2, некоторые статоры были спроектированы так, чтобы иметь две электрически отдельные обмотки. Одновременно используется только одна обмотка. Соотношение этих обмоток не обязательно должно быть 1:2, но может быть любым разумным соотношением. Например, одна обмотка может быть двухполюсной, а другая — шестиполюсной.
При активации двухполюсной обмотки асинхронный двигатель будет вращаться со скоростью 3000 об/мин. В течение этого периода другая обмотка, если она не подключена по схеме «звезда», должна иметь разомкнутые мосты треугольника, чтобы предотвратить протекание наведенных токов в неиспользуемой обмотке. При наличии подходящего переключателя обмотки можно было бы поменять местами без остановки двигателя или связанной с ним машины. Затем асинхронный двигатель изменит скорость до 1000 об/мин.
При наличии подходящего переключателя обмотки можно было бы поменять местами без остановки двигателя или связанной с ним машины. Затем асинхронный двигатель изменит скорость до 1000 об/мин.
Ступенчатое управление скоростью с полюсной амплитудной модуляцией (PAM) является менее известной системой. Он был разработан для близких скоростей, таких как замена четырехполюсника на шестиполюсник и восьмиполюсника на десятиполюсник. Он основан на принципе неравных групп катушек внутри асинхронного двигателя при его изготовлении. Соединения выполняются с помощью специальных контакторов для управления ступенями скорости.
Обмотки PAM защищены авторским правом, но могут производиться по лицензии. Двигатели PAM имеют мощность всего 0,5 кВт, но производятся и мощностью до 7 МВт.
Управление скоростью путем изменения частоты
Одним из важных аспектов этого метода управления скоростью является то, что при более высоких частотах стандартный асинхронный двигатель работает со скоростью, значительно превышающей расчетную. При повышенных скоростях улучшается циркуляция воздуха, в результате чего улучшается охлаждение.
При повышенных скоростях улучшается циркуляция воздуха, в результате чего улучшается охлаждение.
Улучшенное охлаждение позволяет использовать более высокие плотности тока, даже несмотря на повышенные потери на трение и сопротивление воздуха из-за более высоких скоростей. Существуют также повышенные потери в железе из-за более высоких частот. При более высоких частотах сопротивление обмоток также увеличивается и для обеспечения постоянной индукции в воздушном зазоре требуется более высокое напряжение питания.
При постоянной плотности потока в воздушном зазоре крутящий момент пропорционален протекающему току.
Поскольку мощность зависит как от крутящего момента, так и от скорости, можно видеть, что выходная мощность асинхронного двигателя увеличивается быстрее, чем скорость.
Повышение частоты всей установки приведет к тому, что все двигатели будут работать с более высокой скоростью, а это не всегда желательно. Уменьшение частоты приведет к тому, что все двигатели будут работать медленнее, и приведет к тому же нежелательному результату.
В общем, изменение частоты как метод управления скоростью ограничивается конкретными машинами или группами машин, как, например, в ряде транспортных роликов на сталелитейном заводе.
Существует два основных метода изменения частоты. Первый использует вращающееся оборудование для достижения желаемого результата. Это дорого, хотя и менее эффективно, чем некоторые другие методы, но опыт показал, что он чрезвычайно надежен и требует минимального обслуживания. Поэтому он до сих пор широко используется.
Второй метод использует электронное переключение для синтеза волны переменного тока неправильной формы из постоянного тока. Это сравнительно новая процедура, и она стала очень популярной.
Вращающееся оборудование для частотного регулирования
Одной из распространенных систем управления двигателем является двигатель Schrage, в котором скорость изменяется путем регулировки положения щеток для каждой фазы.
На рис. 2 показан другой метод управления скоростью. В данном случае это метод Крамера для управления скоростью асинхронного двигателя с фазным ротором. Видно, что четыре вращающиеся машины используются для управления скоростью одного двигателя.
В данном случае это метод Крамера для управления скоростью асинхронного двигателя с фазным ротором. Видно, что четыре вращающиеся машины используются для управления скоростью одного двигателя.
Рисунок 2 Привод Kramer с использованием вращающихся машин
Система может быть экономически оправдана только для очень больших асинхронных двигателей или объединенных групп двигателей в тяжелой промышленности. Там, где двигатели Schrage имеют практические ограничения, система Kramer может быть построена в диапазоне мегаватт. Надежность и минимальное обслуживание хорошо зарекомендовали себя в обеих системах.
Асинхронные двигатели с фазным ротором
Скольжение в любом асинхронном двигателе пропорционально потерям в меди ротора. В асинхронном двигателе с фазным ротором сопротивление ротора можно изменять с добавлением внешнего сопротивления, поэтому потери в меди и скорость вращения ротора можно регулировать с помощью контроллера.
Поскольку ток ротора пропорционален развиваемому крутящему моменту, из этого следует, что потери ротора будут изменяться в зависимости от приложенной нагрузки, что влияет на скорость. Этот метод управления скоростью характеризуется изменением скорости при изменении нагрузки; то есть увеличение нагрузки приводит к снижению скорости, а уменьшение нагрузки приводит к увеличению скорости.
По этой причине регулирование скорости асинхронного двигателя с фазным ротором путем изменения сопротивления ротора удовлетворительно только при постоянной нагрузке. Скорости ниже половины скорости полной нагрузки нецелесообразны, а повышенные потери на более низких скоростях приводят к высоким рабочим температурам, которые могут превысить номинальные характеристики асинхронного двигателя. КПД двигателя низкий, регулирование скорости плохое, а внешние сопротивления потребляют расточительную энергию.
Были опробованы различные методы контроля скорости. Два самых распространенных:
1 . Неравные напряжения, приложенные к обмоткам статора
Неравные напряжения, приложенные к обмоткам статора
2 . В обмотки ротора вставлены неодинаковые сопротивления.
В отличие от описанных выше вращающихся машин, эти изменения скорости являются ступенчатыми. Вероятно, наиболее распространено применение в механизмах подъема и опускания мостовых кранов.
Электронный регулятор частоты
Быстрый прогресс в области полупроводниковых технологий привел к гораздо более эффективным и действенным средствам изменения частоты сети. На рис. 3 показаны блок-схемы инверторных приводов.
Рисунок 3 Блок-схемы частотно-регулируемых приводов
Трехфазное питание сначала преобразуется в питание постоянного тока. Есть по крайней мере два возможных метода преобразования в общем использовании. Один из них заключается в использовании фиксированной или неуправляемой схемы выпрямителя, а другой — в использовании схемы управляемого выпрямителя. Каждый тип схемы имеет свои преимущества и недостатки.
Каждый тип схемы имеет свои преимущества и недостатки.
Неуправляемые выпрямители
Выходное напряжение схемы неуправляемого выпрямителя (например, мостового выпрямителя) зависит от входного напряжения переменного тока. Затем выход постоянного тока подается на схему «прерывателя». Его функция состоит в том, чтобы включать и выключать постоянный ток со скоростью, превышающей основную частоту источника питания. Действие включения/выключения регулирует средний уровень напряжения постоянного тока, подаваемого на инвертор.
На рис. 3(a) показана приблизительная прямоугольная форма выходного сигнала прерывателя. Затем он проходит через схему фильтра, чтобы удалить столько переходных процессов и пиков, сколько экономически целесообразно, и затем становится входом в схему инвертора.
Управляемые выпрямители
Схема управляемого выпрямителя, такая как схема, использующая управляемые кремнием выпрямители с фазовой регулировкой, имеет преимущества быстрого отклика, относительной дешевизны и способности поддерживать рекуперативное действие подачи энергии обратно в сеть. Его недостаток заключается в том, что он работает с отстающим коэффициентом мощности.
Его недостаток заключается в том, что он работает с отстающим коэффициентом мощности.
Поскольку постоянный ток от управляемого выпрямителя не нужно подавать через цепь прерывателя, эта схема имеет тенденцию быть менее сложной и, возможно, более эффективной. Выход обычно фильтруется перед подачей в секцию инвертора (см. Рисунок 3(b) ).
Для обеспечения оптимальной работы асинхронного двигателя переменного тока с переменной частотой питания необходимо поддерживать расчетные условия магнитного потока в магнитной цепи асинхронного двигателя. Обычно это достигается поддержанием постоянного отношения напряжения питания к частоте. Любое изменение частоты должно сопровождаться изменением напряжения, то есть:
Фактический тип цепи и метод управления во многом зависят от применения асинхронного двигателя. Баланс должен быть выбран между желаемыми факторами скорости, крутящего момента и мощности.
Другими факторами, влияющими на это, являются тип цепей в блоке и то, посылает ли конечный выход сигнал собственной производительности на вход блока для контроля и самонастройки блока.
Подведение итогов:
A. Инвертор управляет выходной частотой.
B. Напряжение двигателя задается напряжением звена постоянного тока.
C. Можно управлять другими параметрами, такими как ток, минимальная и максимальная скорость компенсации скольжения и компенсации скольжения.
D. Ускорение и увеличение и уменьшение пускового тока можно контролировать.
Рисунок 4 Типовой электронный блок управления частотой для асинхронного двигателя
Методы управления скоростью асинхронного двигателя перечислены в Таблица 1 . Таблица 1 Методы регулирования скорости асинхронного двигателя0110 Способ регулирования скорости Переменный ток, короткозамкнутый диск, многоскоростной Падение скорости до 5% от двух или более начальных скоростей 90. 2590 Обмотки с разным числом полюсов или переподключение одной обмотки для изменения числа полюсов Переменный ток, короткозамкнутая обмотка, односкоростная Падение скорости до 15 %, в зависимости от конструкции Контроль первичного напряжения. Регулирование частоты статора при постоянном напряжении на цикл Переменный ток, токосъемное кольцо Падение скорости до 50 %, в зависимости от сопротивления ротора Вторичный резистор, подключенный к токосъемным кольцам. Машинное и твердотельное преобразование обратной связи мощности ротора Переменный ток, синхронный Без падения скорости. Скорость задается частотой статора Регулируемая частота от мотор-генератора или полупроводникового преобразователя частоты
2590 Обмотки с разным числом полюсов или переподключение одной обмотки для изменения числа полюсов Переменный ток, короткозамкнутая обмотка, односкоростная Падение скорости до 15 %, в зависимости от конструкции Контроль первичного напряжения. Регулирование частоты статора при постоянном напряжении на цикл Переменный ток, токосъемное кольцо Падение скорости до 50 %, в зависимости от сопротивления ротора Вторичный резистор, подключенный к токосъемным кольцам. Машинное и твердотельное преобразование обратной связи мощности ротора Переменный ток, синхронный Без падения скорости. Скорость задается частотой статора Регулируемая частота от мотор-генератора или полупроводникового преобразователя частоты
Нашли apk для андроида? Вы можете найти новые бесплатные игры и приложения для Android.