Содержание
Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Поиск на сайте DPVA Поставщики оборудования Полезные ссылки О проекте Обратная связь Ответы на вопросы. Оглавление
|
Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация/ / Оборудование/ / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета. Поделиться:
Поиск в инженерном справочнике DPVA. Введите свой запрос: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Коды баннеров проекта DPVA.ru Консультации и техническая |
Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса.Free xml sitemap generator |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Формула расчета частоты вращений
Содержание
- 1 Синхронные и асинхронные электромашины
- 1.1 Синхронная скорость
- 1.2 Скольжение
- 1.3 Регулировка частоты вращения
- 2 Двигатели постоянного тока
- 2.1 Номинальная скорость вращения
- 2.2 Регулировка скорости
- 3 Видео
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.
Тахометр
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.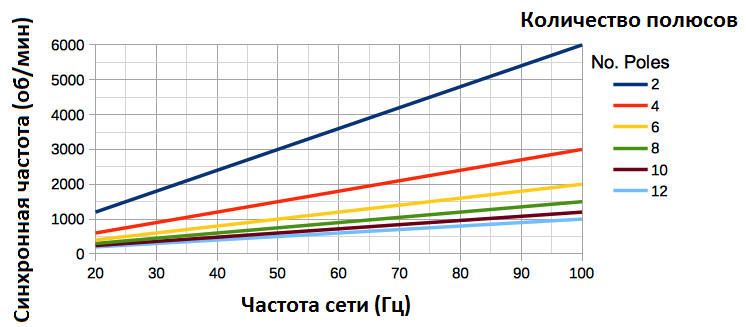
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.

Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
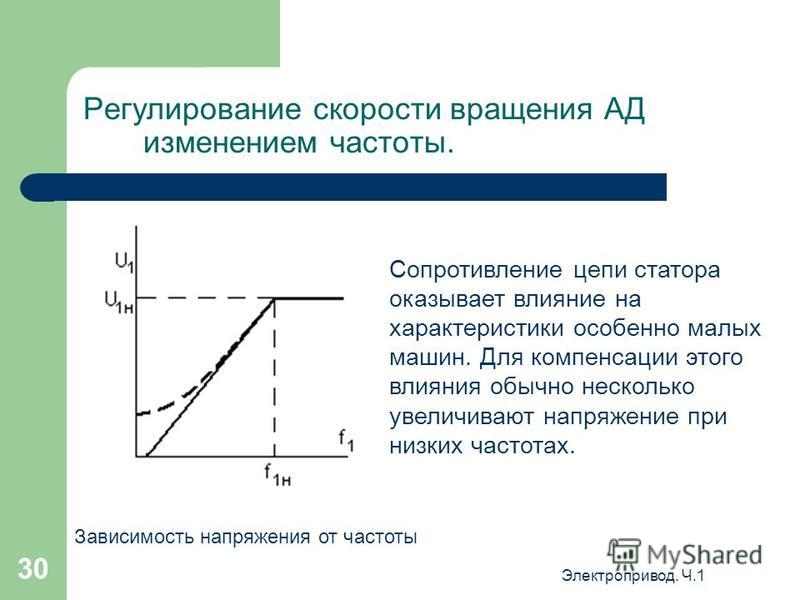
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
 Такой же результат даёт уменьшение питающего напряжения;
Такой же результат даёт уменьшение питающего напряжения;
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Резонансная частота: формула
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Оцените статью:
В чем разница между скоростью вращения и скоростью взлета?
спросил
Изменено
6 лет, 1 месяц назад
Просмотрено
6к раз
$\begingroup$
Мой учитель авиации сказал нам, чтобы мы, помимо прочего, запомнили некоторые значения скорости перед нашей летной подготовкой:
$V_R$ = 40 узлов
$V_S$ = 39 узлов
Согласно Википедии:
Вр:
Скорость, с которой пилот начинает применять управляющие сигналы, чтобы вызвать
нос самолета поднять вверх, после чего он оторвется от земли.
Но я как-то запутался со значениями, так как скорость взлета (по тому, чему меня учили) должна быть на 10-25% больше Vs, в данном случае около 43 и 49 уз.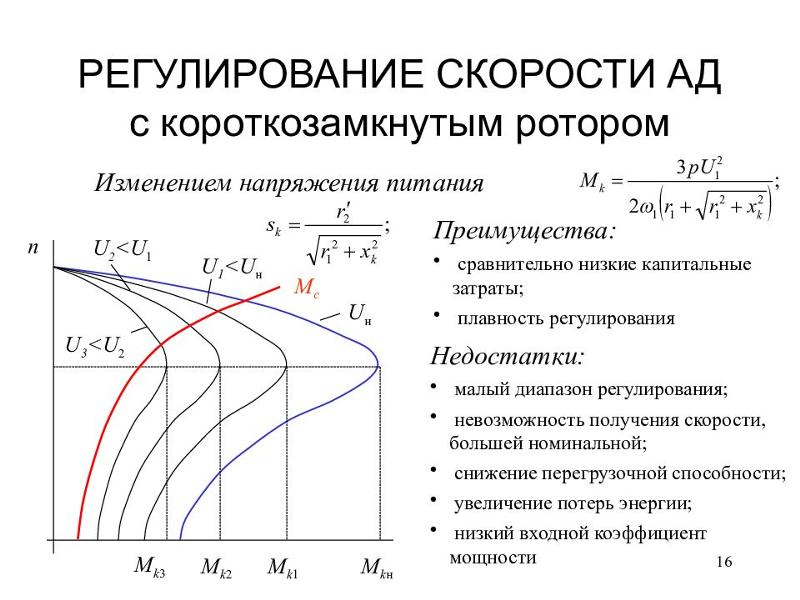
Если определение Vr указано выше, какой должна быть взлетная скорость? у него есть определение в V скоростях? Разве скорость взлета не скорость, с которой самолет отрывается от земли?
Спасибо
- взлет
- скорость
$\endgroup$
0
$\begingroup$
Судя по скоростям, о которых вы говорите, это не определение турбореактивного двигателя, которое вы ищете. Определение $V_R$, которое вы дали, относится к турбореактивным двигателям.
На небольших самолетах общего назначения я учу своих студентов вращаться вокруг $1,3V_{S0}$, что на самом деле означает медленно поднимать нос до положения тангажа при взлете. Ни при каких обстоятельствах я не хочу, чтобы они отрывали самолет от земли. Если все сделано правильно, самолет естественным образом взлетит, когда будет к этому готов.
$\endgroup$
$\begingroup$
Вам нужно добавить некоторое время для вращения, чтобы получить достаточное изменение угла атаки, чтобы дрон мог взлететь. Пока пилот опускает хвост и вращается вокруг основного шасси, самолет продолжает разгоняться. Кроме того, коэффициент 1,3 должен быть достигнут только после набора высоты 35 футов (или 50 футов, в зависимости от сертификации). Что происходит, так это то, что пилот начинает тянуть прямо на скорости сваливания, самолет начинает производить больше прижимной силы в хвосте, пока передняя стойка шасси не поднимается, затем вращается до тех пор, пока угол атаки не вырастет примерно до 10 °, чтобы крылья создавали достаточную подъемную силу для Отгул. В это время самолет разгонится примерно до 1,15-кратной скорости сваливания и начнет набор высоты, что требует еще большего изменения шага. Теперь сопротивление будет увеличиваться на величину индуктивного сопротивления, создаваемого добавленной подъемной силой, поэтому скорость ускорения замедляется. Тем не менее, пока не будет достигнута высота 35 футов, самолет будет ускоряться до 1,3-кратной скорости сваливания в этой точке.
Пока пилот опускает хвост и вращается вокруг основного шасси, самолет продолжает разгоняться. Кроме того, коэффициент 1,3 должен быть достигнут только после набора высоты 35 футов (или 50 футов, в зависимости от сертификации). Что происходит, так это то, что пилот начинает тянуть прямо на скорости сваливания, самолет начинает производить больше прижимной силы в хвосте, пока передняя стойка шасси не поднимается, затем вращается до тех пор, пока угол атаки не вырастет примерно до 10 °, чтобы крылья создавали достаточную подъемную силу для Отгул. В это время самолет разгонится примерно до 1,15-кратной скорости сваливания и начнет набор высоты, что требует еще большего изменения шага. Теперь сопротивление будет увеличиваться на величину индуктивного сопротивления, создаваемого добавленной подъемной силой, поэтому скорость ускорения замедляется. Тем не менее, пока не будет достигнута высота 35 футов, самолет будет ускоряться до 1,3-кратной скорости сваливания в этой точке.
Вот как проходит взлетная дистанция для сертификации, чтобы достичь минимальной дистанции. В зависимости от скорости вращения (обычно от 3° до 5° в секунду) и избыточной тяги двигателя для оптимального взлета может потребоваться начать процесс вращения на скорости, меньшей скорости сваливания. Для дополнительной безопасности рекомендуется оставаться на земле немного дольше, если это позволяет доступная взлетно-посадочная полоса.
В зависимости от скорости вращения (обычно от 3° до 5° в секунду) и избыточной тяги двигателя для оптимального взлета может потребоваться начать процесс вращения на скорости, меньшей скорости сваливания. Для дополнительной безопасности рекомендуется оставаться на земле немного дольше, если это позволяет доступная взлетно-посадочная полоса.
$\endgroup$
2
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
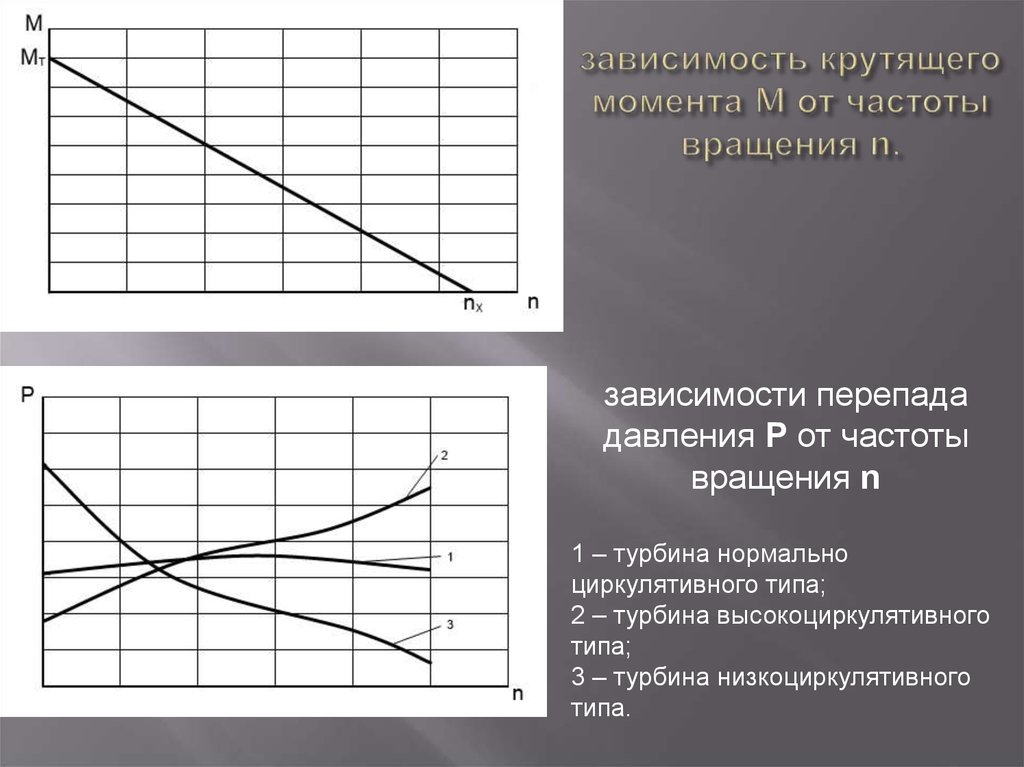
В чем разница между скоростью и крутящим моментом?
Роторный двигатель предназначен для обеспечения желаемой выходной скорости вращения при преодолении различных вращательных нагрузок, противодействующих этому выходному вращению (крутящий момент). Скорость и крутящий момент напрямую связаны и являются двумя основными факторами производительности при правильном выборе двигателя для конкретного применения или использования. Чтобы узнать, как выбрать двигатель, подходящий для вашего применения, в первую очередь необходимо понять взаимосвязь между скоростью, крутящим моментом и выходной мощностью двигателя.
Скорость в зависимости от крутящего момента
Выходная мощность двигателя устанавливает границы скорости и крутящего момента двигателя на основе уравнения:
Мощность (P) = скорость (n) x крутящий момент (M)
-
-
Мощность: Механическая выходная мощность двигателя определяется как выходная скорость, умноженная на выходной крутящий момент, и обычно измеряется в ваттах (Вт) или лошадиных силах (л. с.).
- Скорость: Скорость двигателя определяется как скорость вращения двигателя. Скорость электродвигателя измеряется в оборотах в минуту или об/мин.
- Крутящий момент: Выходной крутящий момент двигателя — это сила вращения, которую развивает двигатель. Крутящий момент небольшого электродвигателя обычно измеряется либо в дюйм-фунтах (дюйм-фунтах), ньютон-метрах (Н-м), либо в других единицах измерения, преобразованных напрямую.
-
Мощность: Механическая выходная мощность двигателя определяется как выходная скорость, умноженная на выходной крутящий момент, и обычно измеряется в ваттах (Вт) или лошадиных силах (л.
 с.).
с.).
Поскольку номинальная выходная мощность двигателя является фиксированной величиной, скорость и крутящий момент обратно пропорциональны. По мере увеличения выходной скорости доступный выходной крутящий момент пропорционально уменьшается. По мере увеличения выходного крутящего момента выходная скорость пропорционально уменьшается. Это соотношение мощности, скорости и крутящего момента обычно иллюстрируется кривой производительности двигателя, которая часто включает потребление тока двигателя (в амперах) и КПД двигателя (в %).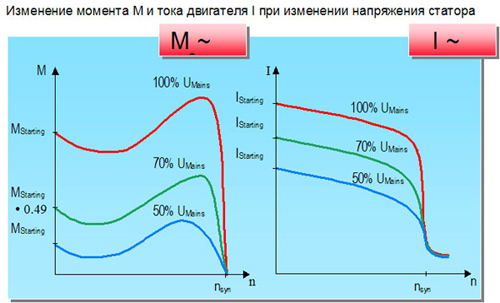
Соображения по скорости и крутящему моменту при выборе электродвигателя
Ключом к выбору правильного двигателя для конкретной функции является, прежде всего, понимание требований приложения. Поскольку большинство приложений двигателей являются динамическими, а это означает, что требования к крутящему моменту и скорости изменяются в рамках приложения, очень важно определить различные рабочие точки в приложении. Знание или расчет требований к скорости и крутящему моменту в каждой рабочей точке приложения позволит определить общие требования к скорости и крутящему моменту для соответствующего двигателя. Выбор двигателя можно проверить, нанеся различные рабочие точки на кривую характеристик выбранного двигателя, чтобы убедиться, что каждая точка зависимости скорости от крутящего момента попадает в соответствующую зону кривой (непрерывные или прерывистые зоны).
Во многих случаях требования к применению требуют выбора стандартного двигателя значительно большего размера, чтобы гарантировать охват всех рабочих точек.