Содержание
Администрация Октябрьского района — Обгон должен быть безопасным!
26 июня 2020 года по всей Республике Беларусь пройдет Единый день безопасности дорожного движения, направленный на предупреждение ДТП в результате выезда на полосу встречного движения.
Нередко дорожно-транспортные происшествия с тяжелыми последствиями происходят в результате нарушения водителями правил обгона и маневрирования.
Обгон – это опережение одного или нескольких транспортных средств, связанное с выездом на встречную полосу движения (сторону проезжей части дороги). Так как обгон осуществляется с выездом на сторону встречного движения, то представляет повышенную опасность и требует от водителя правильных и безошибочных решений.
До начала обгона водитель должен убедиться в том, что полоса движения, на которую он намерен выехать, свободна и своими действиями он не создаст угрозу безопасности дорожного движения, не заставит участников дорожного движения изменить направление и (или) снизить скорость движения. Для того чтобы водитель был уверен в безопасности, ему нужно представлять, какое расстояние понадобится для обгона. Длина пути обгона зависит от скорости обгоняемого и обгоняющего автомобилей, разницы в скоростях между ними.
Для того чтобы водитель был уверен в безопасности, ему нужно представлять, какое расстояние понадобится для обгона. Длина пути обгона зависит от скорости обгоняемого и обгоняющего автомобилей, разницы в скоростях между ними.
Водителю запрещается выполнять обгон:
- если водитель транспортного средства, движущегося впереди по той же полосе движения, подал сигнал левого поворота;
- если следующие за ним водители начали обгон.
Объезд транспортного средства, водитель которого подал сигнал поворота налево и приступил к выполнению маневра, производится с правой стороны.
Водитель обгоняемого транспортного средства обязан с учетом дорожно-транспортной обстановки двигаться ближе к правому краю проезжей части дороги и не препятствовать обгону увеличением скорости движения или иными действиями.
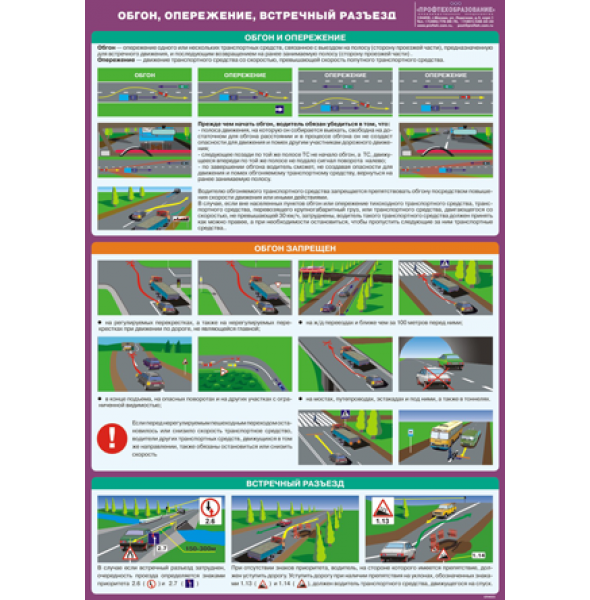
Обгон запрещается:
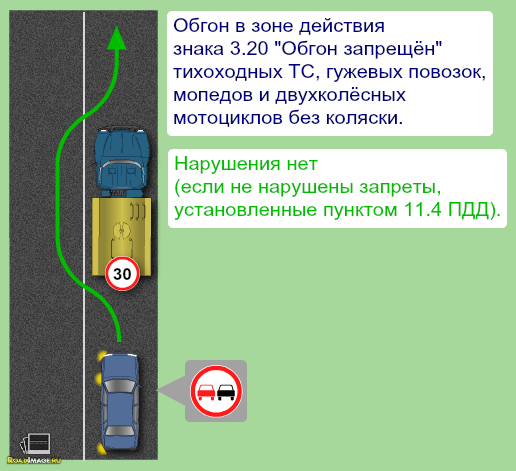
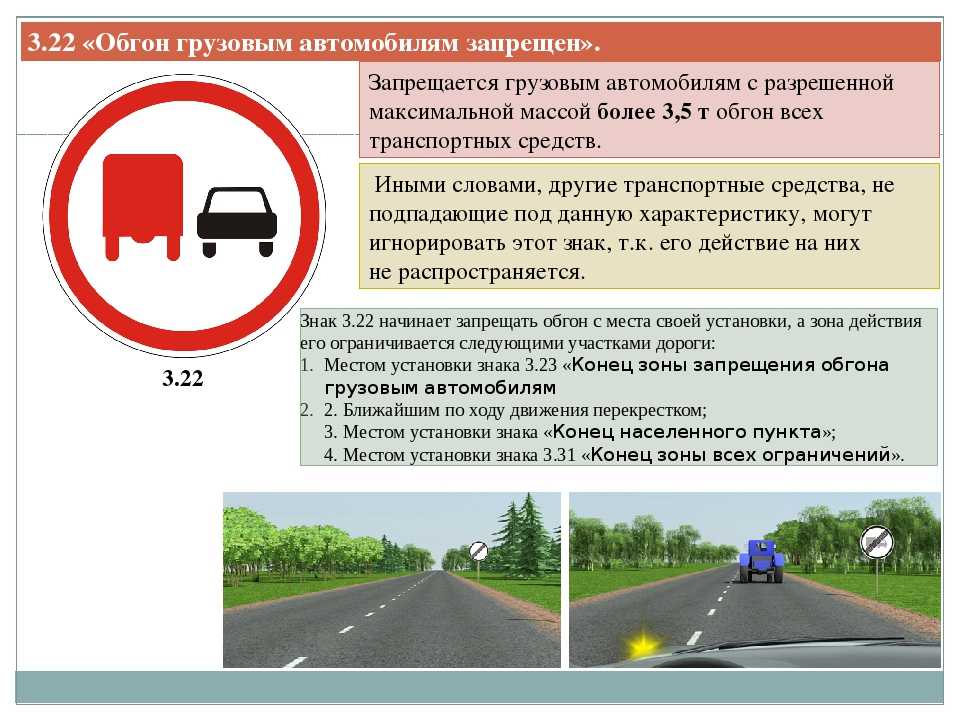
в зоне действия дорожных знаков «Обгон запрещен», «Обгон грузовым автомобилям запрещен», на поворотах дороги, обозначенных дорожными знаками «Опасный поворот», «Опасные повороты», на подъемах, обозначенных дорожным знаком «Крутой подъем», а также при наличии дорожной разметки 1. 1 (за исключением обгона одиночного транспортного средства, движущегося со скоростью менее 30 км/ч), в конце подъемов и на других участках дорог с ограниченной обзорностью дороги;
1 (за исключением обгона одиночного транспортного средства, движущегося со скоростью менее 30 км/ч), в конце подъемов и на других участках дорог с ограниченной обзорностью дороги;
- на обозначенных и (или) регулируемых перекрестках;
- на пешеходных переходах и ближе 50 метров от них в обе стороны;
- транспортного средства, производящего обгон или объезд препятствия;
- при недостаточной видимости дороги;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах и ближе чем за 100 метров перед ним.
Причины для этих запретов вполне очевидны. Кроме того, следует помнить, что обгон может быть запрещен нанесенной на проезжей части сплошной линией дорожной разметки, разделяющей транспортные потоки противоположных направлений, за исключением обгона одиночного транспортного средства, движущегося со скоростью менее 30 км/ч.
Вне населенных пунктов водитель тихоходного, тяжеловесного и (или) крупногабаритного транспортного средства, а также транспортного средства, конструкция которого, перевозимый груз или техническое состояние затрудняют его обгон, должен занять положение на дороге как можно правее, а при необходимости и остановиться, чтобы пропустить скопившиеся за ним транспортные средства.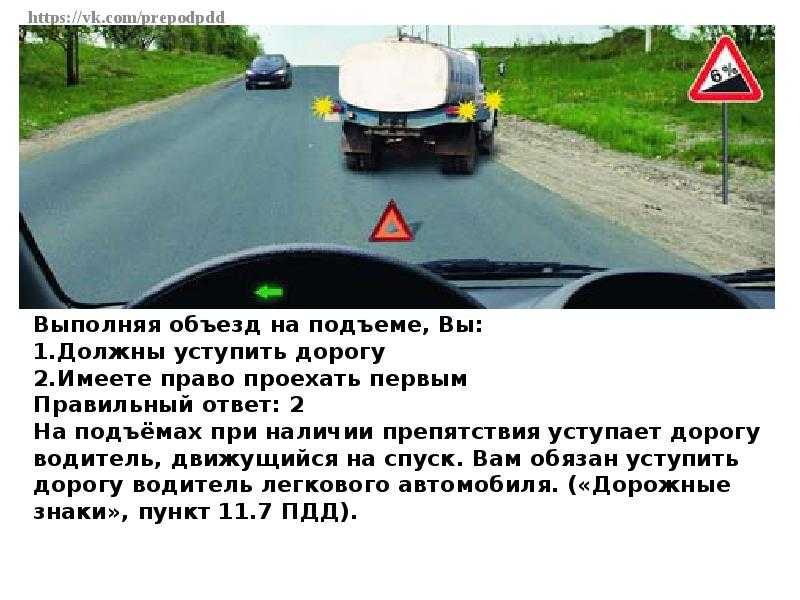
Если встречный разъезд транспортных средств затруднен, то водитель, на стороне которого имеется препятствие для дорожного движения, обязан уступить дорогу.
На уклонах, обозначенных дорожными знаками «Крутой спуск», «Крутой подъем», при наличии препятствия для дорожного движения уступить дорогу обязан водитель транспортного средства, движущегося на спуск.
За нарушение лицом, управляющим транспортным средством правил обгона либо выезд на полосу встречного движения, в случаях, когда это запрещено Правилами дорожного движения, предусмотрена административная ответственность в виде штрафа в размере от 2 до 10 базовых величин с лишением права управления транспортным средством на срок до 1 года или без лишения (ч. 8 ст. 18.14. КоАП Республики Беларусь). Если данные действия повлекли создание аварийной обстановки, то нарушителю будет грозить штраф от 5 до 20 базовых величин с лишением права управления транспортным средством до 2-х лет или без лишения (ч. 10 ст. 18.14. КоАП Республики Беларусь).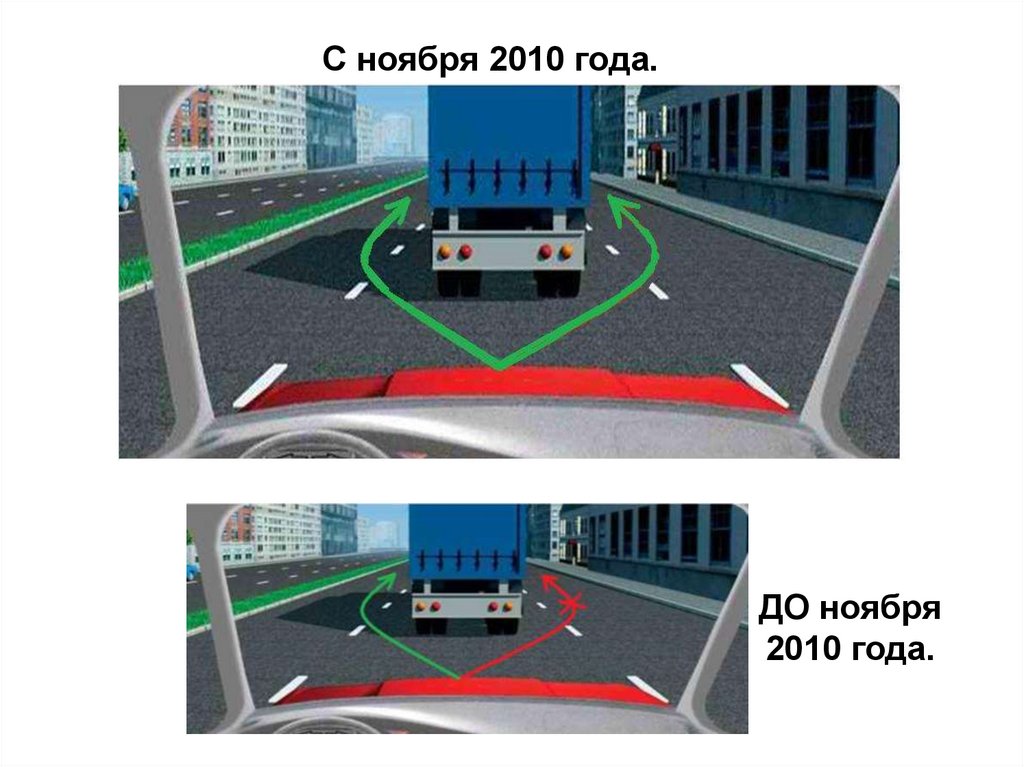
Уважаемые водители! Будьте предельно внимательны на дорогах и строго соблюдайте Правила дорожного движения! Помните, Вас ждут дома!
Старший инспектор по АиП ОГАИ МОБ
Октябрьского РУВД г.Минска
Виктория Царук
Учим ПДД: Обгон разрешен или нет?
-
icon -
facebook
-
telegram
-
instagram
-
youtube
-
search
Автор
joldo.kg
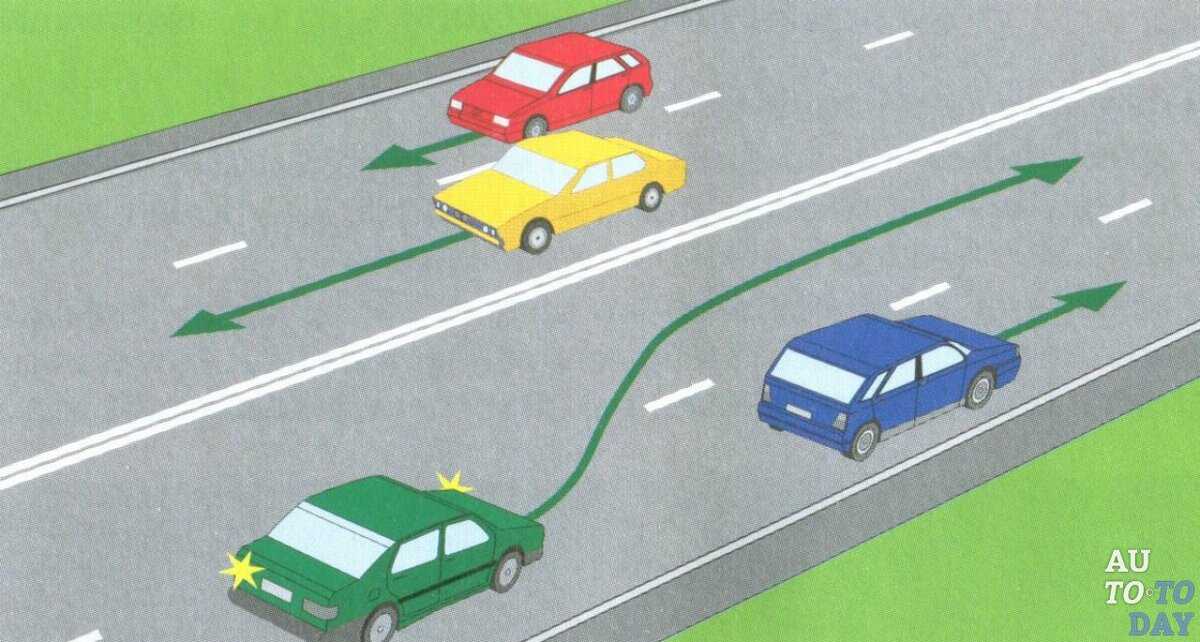
Если поедем так, как показано на схеме, нарушим или нет?
- Тут действует знак «Обгон запрещен».
 Придется плестись за красной машиной до отмены запрета
Придется плестись за красной машиной до отмены запрета - Знак «Обгон запрещен» действовал до перекрестка. Но на пешеходных переходах обгонять и так нельзя. Так что едем за красным авто дальше
- Да так можно проехать. Никакие правила я при этом не нарушу
- Пешеход же собирается переходить дорогу. Нужно остановиться и пропустить его
 Придется плестись за красной машиной до отмены запрета
Придется плестись за красной машиной до отмены запретаОбгон не зря называют самым опасным маневром — это действительно так. Однако для начала давайте вспомним основные моменты.
Первое —посмотрим на определение самого маневра. Об этом говорится в пункте 1.2. ПДД КР 2019:
Обгон — опережение одного или нескольких движущихся транспортных средств по дороге другим транспортным средством, связанное с выездом из занимаемой полосы, в том числе с выездом на встречную полосу. (начиная с марта 2020 в КР будут действовать новая редакция ПДД согласно которой этот маневр не будет считаться обгоном). Но пока это считается обгоном рассмотрим эту ситуацию.
На нашей схеме зона действия знака 3. 20 «Обгон запрещен» заканчивается на перекрестке.
20 «Обгон запрещен» заканчивается на перекрестке.
Пункт 14.2 Правил обязывают нас снизить скорость или остановиться перед переходом, если другие также притормозили. По нашим условиям автомобиль скорость не снижает, а просто медленно двигается.
Тот факт, что слева начинает движение пешеход, не требует вашей остановки. Дело в том, что согласно пункту 14.1 Правил водитель обязан уступить дорогу пешеходам, переходящим дорогу или вступившим на проезжую часть. Но термин «Уступить дорогу (не создавать помех)» означает, что водитель в данном случае не должен начинать, возобновлять или продолжать движение, если это может вынудить пешехода изменить направление движения или скорость. Учитывая ширину полос, скорость движения нашего автомобиля и пешехода, помех последнему в этом случае не создается. А значит, выполнить маневр можно. Но если пешеходы в момент обгона будут на переходе, тогда согласно пункту 11.5. обгон запрещен.
(эта статья будет пересмотрена после выхода новых ПДД КР)
Статья основана на материале: zr. ru
ru
Версия на кыргызском языке
Тэги:
-
Маневрирование
Joldo.kg © 2023.
Все права сохраняются
Разработка сайта PxDesign
[PDF] Методы обнаружения обгоняющих транспортных средств на основе оптического потока и сверточной нейронной сети
- title={Методы обнаружения обгонов на основе оптического потока и сверточной нейронной сети},
автор={Лу-Тин Ву и Х. Линь},
booktitle={Международная конференция по автомобильным технологиям и интеллектуальным транспортным системам},
год = {2018}
}По мере роста числа приложений для интеллектуальных транспортных средств в последние годы разработка бортовых систем технического зрения для расширенной помощи при вождении стала популярной темой исследований. В этой статье представлена система реального времени, использующая монокулярную камеру, установленную в задней части транспортного средства, для обнаружения обгонов для безопасной смены полосы движения.
В этой работе возможное обгоняющее транспортное средство сначала находится на основе сигналов движения. Затем кандидат идентифицируется с помощью сверточной нейронной сети (CNN… 9).0011Обнаружение транспортных средств в режиме реального времени на основе оптического потока и сверточной нейронной сети
- Lu-Ting Wu, T. Luan, H. Lin
Компьютерная наука
SmartGreens/Ahtern
- 2018
Эта статья представляет систему обнаружения обгоняющих транспортных средств в режиме реального времени с использованием монокулярной камеры, установленной в задней части транспортного средства, которая призвана помочь водителям или беспилотным автомобилям выполнять операции по безопасной смене полосы движения.
Система предупреждения о слепых зонах на основе зрения от Deep Neural Networks
- G. VíctorR.Virgilio, Juan Humberto Sossa Azuela, Erik Zamora
Информатика
MCPR
- 2020
A Предупреждающая система, способная выявлять (виртуальные) слепые автомобили вокруг автомобилей более интуитивно понятный вспомогательный интерфейс для водителя, позволяющий лучше и быстрее понимать окружающую среду с монокулярных камер.
Предупреждение о препятствиях сзади для движения задним ходом с использованием методов стереозрения
- Po-Yuan Huang, H. Lin
Информатика
Международная конференция IEEE по системам, человеку и кибернетике (SMC) 2019
- 2019
на карте параллакса, а представление изображения, называемое stixel, используется для сцены дорожного движения на открытом воздухе в виде столбцов, чтобы напоминать водителям о движении назад.
Система управления сменой полосы движения на высокоскоростном транспортном средстве для маневра обгона на основе навигации
Предлагается подход, который сочетает в себе навигацию с наведением и визуальное обнаружение на основе изображений для маневров слежения за дорогой и обгона, и показано, что вся система является входом для стабильного состояния (ISS).
Система управления сменой полосы движения на высокоскоростном транспортном средстве для обгона
Смена полосы движения и обгон являются фундаментальной технологией автономного вождения.
В этом документе предлагается подход, который сочетает в себе навигацию с наведением и визуальное обнаружение на основе изображений для дорожного…Enhancing transportation systems via deep learning: A survey
Vehicle Telematics Via Exteroceptive Sensors: A Survey
- Fernando M. Ortiz, Matteo Sammarco, L. Costa, Marcin Detyniecki
Computer Science
ArXiv
- 2020
Показано, что экстероцептивные датчики, такие как микрофоны или камеры, могут заменить проприоцептивные во многих областях, и представлена таксономия датчиков в телематике, подчеркивающая преимущества, недостатки и наличие в готовых устройствах.
Pattern Recognition: 12th Mexican Conference, MCPR 2020, Morelia, Mexico, June 24–27, 2020, Proceedings
- Karina Mariela Figueroa Mora, J. A. Marín, Karina Figueroa
Computer Science
MCPR
- 2020
Представлен метод классификации изображений на основе облегченных сверточных нейронных сетей (CNN) с целью ускорения процесса оформления заказа в магазинах, представлен новый набор данных изображений, учитывающий три класса фруктов, внутри или без пластиковых пакетов .
Как построить основанную на графах архитектуру глубокого обучения в области трафика: обзор
В этом обзоре тщательно рассматриваются различные архитектуры глубокого обучения на основе графов во многих приложениях для управления трафиком, обсуждаются их общие методы глубокого обучения, уточняется использование каждого метода в дорожные задачи.
Умные города, зеленые технологии и интеллектуальные транспортные системы: 7-я международная конференция SMARTGREENS и 4-я международная конференция VEHITS 2018, Фуншал-Мадейра, Португалия, 16-18 марта 2018 г., пересмотренные избранные статьи
- R. M. González, M. Gibescu, S. Cobben, M. Bongaerts, Marcel de Nes-Koedam, W. Vermeiden
Engineering
SmartGreens/Artans
- 2019
6 внедрение двух разных нелинейных авторегрессионных нейронных сетей для прогнозирования глобальной горизонтальной солнечной радиации (GHI) в краткосрочные периоды времени (т.
е. от 15 до 120 минут в будущем).ПОКАЗЫВАЮТСЯ 1-10 ИЗ 24 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантностьНаиболее влиятельные статьиНовости
Система помощи при смене полосы движения, основанная на отслеживании движущихся транспортных средств
Схема, управляемая оптическим потоком, фокусирующаяся на поле зрения в боковом зеркале путем размещения камеры поверх него для сегментации заднего вида и отслеживания обгоняющего транспортного средства и представляет контрольную схему проверки для оценки жизнеспособности и надежности системы.
Интеграция движения и внешнего вида для обнаружения обгоняющих транспортных средств
Эта работа посвящена обнаружению обгоняющих транспортных средств на автостраде с помощью монокулярных камер, обращенных вперед и назад, и включает сигналы движения с места происшествия, чтобы компенсировать недостатки детекторов на основе внешнего вида.
Обнаружение и позиционирование обгоняющих транспортных средств с использованием одномерного оптического потока
Предлагаемое решение использует одномерный оптический поток, оцениваемый вдоль линий, параллельных движению обгоняющих транспортных средств, для обнаружения обгоняющего транспортного средства с помощью одной камеры, установленной за ветровым стеклом автомобиля с датчиком.
Встроенная система помощи при обнаружении слепых зон в режиме реального времени
- Бинг-фей Ву, Чжи-Чунг Као, Инцзе Ли, Мин Ю Цай
Инженерное дело
- 2012
В данной статье представлена эффективная система обнаружения транспортных средств и мотоциклов в слепой зоне в дневных и ночных сценах. Предлагаемый метод идентифицирует транспортное средство и мотоцикл путем обнаружения…
Система технического зрения для обнаружения и распознавания дорожных знаков
Система автоматического распознавания дорожных знаков с использованием видеозаписей, записанных с бортового видеорегистратора, на основе обработки изображений, двустороннего китайского преобразования и представлены методы вершинного и биссектрисного преобразования.
Обнаружение движущихся транспортных средств на основе оценки оптического потока Edge
- Yanfeng Chen, Qingxiang Wu
Компьютерная наука, Физика
2015 11th International Conference по натуральным вычислениям (ICNC)
- 2015
9007
66. который называется взвешенным алгоритмом кластеризации оптического потока Kmeans, предлагается для кластеризации характерных точек и используется для идентификации шаблона транспортного средства набора характерных точек в оптическом потоке, чтобы движущееся транспортное средство можно было эффективно выделить из сложного динамического фона.
Распознавание дорожных знаков с помощью многозадачной сверточной нейронной сети
Новая система, управляемая данными, для распознавания всех категорий дорожных знаков, включая как символьные, так и текстовые знаки, в видеопоследовательностях, снятых камерой, установленной на предлагается автомобиль.
Предупреждение о выходе из полосы движения и лобовом столкновении с использованием одной камеры
Экспериментальные результаты показали, что предлагаемый метод способен обеспечить точность предупреждения об опасном дорожном движении с точностью 97 % при сохранении требований к обработке в реальном времени.
Определение скорости автомобиля по размытому изображению одного движения
- Х. Лин, Кун-Джих Ли, Чиа-Хонг Чанг
Физика
Изображение Визу. вычисл.
- 2008
Метод обнаружения слепых зон с использованием задней камеры «рыбий глаз» с комбинацией методов обнаружения транспортных средств
Экспериментальные результаты показывают, что предлагаемый метод приводит к коэффициенту обнаружения более 93% в критическом диапазоне ( слепая зона) хоста, и представлена структура тестирования, которая классифицирует эффективность обнаружения в зависимости от расстояния между хостом и целевым транспортным средством.
Обзор маневров обгона — Fraunhofer IVI
Описание проекта
В сотрудничестве с Техническим университетом Дрездена, факультетом транспорта и дорожного движения «Фридрих Лист», кафедрой дорожного планирования и проектирования дорог, Fraunhofer IVI внес свой вклад в повышение безопасности дорожного движения. Федеральный научно-исследовательский институт автомобильных дорог (BASt) планирует строительство новых дорог по всей Германии. Чтобы сделать маневры обгона более безопасными на этих дорогах, расстояние видимости, вертикальные изгибы и ширину улицы необходимо планировать соответствующим образом. Точные цифры для этих значений взяты из модели обгона, которая описывает обгонное поведение среднего водителя. База данных для определения параметров модели была записана в 1960 и, таким образом, старше 50 лет сегодня. Из-за различных разработок в области автомобилестроения с тех пор жизненно необходимы новые параметры модели. BASt поручил Fraunhofer IVI и Airclip GmbH записывать маневры обгона, чтобы создать новую базу данных для модели обгона.
Для этого выполняются измерительные полеты в различных выбранных точках обгона. Маневры обгона фиксируются сверхширокоугольной камерой на расстоянии 800 метров по каждой из дорог. Камера записывает 15 снимков с 4096 x 2304 пикселей в секунду, которые исправляются и калибруются в рамках автоматизированного последующего процесса. В откалиброванных последовательностях можно выбирать отдельные автомобили, автоматически отслеживать их на видеоизображении и экспортировать траектории их движения. Обработка изображений служит для определения как скорости, так и расстояния транспортных средств, участвующих в маневре обгона. Алгоритмы, необходимые для обработки, были разработаны Fraunhofer IVI. С помощью этого метода в течение месяца было зафиксировано около 400 маневров обгона. В ближайшее время появятся новые записи.
Требования
Для получения соответствующих последовательностей изображений маневров обгона на выбранных маршрутах должны быть выполнены следующие требования:
- Запись продолжительности и расстояния, пройденного всеми сторонами, участвующими в маневре обгона (обгоняемое транспортное средство, обгоняющее транспортное средство, приближающееся транспортное средство ), а также результирующие скорость и ускорение,
- Непрерывная запись данных измерений для всех транспортных средств, участвующих в процессе обгона,
- Видимость больших участков дорог протяженностью не менее 600 метров,
- Метод измерения невидим для водителей и не влияет на поведение водителей.
Параметры камеры
Для измерений мультикоптер HORUS ® оснащен активным модулем камеры с компенсацией неровностей. Карданный подвес компенсирует колебания коптера таким образом, что установленная камера сохраняет постоянный угол записи во время сбора данных измерений.
В связи с тем, что максимальная высота полета HORUS ® составляет 250 метров, и что соответствующий участок необходимо снимать с точки на этой высоте, необходимо использовать объектив с малым фокусным расстоянием. Кроме того, измерительная камера должна быть откалибрована. Калибровка означает определение внутренних и внешних параметров камеры, чтобы координаты пикселей можно было преобразовать в реальные координаты записываемого объекта.
Определение внутренних параметров камеры проводилось в Институте фотограмметрии и дистанционного зондирования Технического университета Дрездена в помещении, предназначенном специально для калибровки объективов типа «рыбий глаз».
140 точек измерения расположены на потолке и стенах. Их координаты объекта известны со стандартным отклонением 0,23 миллиметра.Алгоритм оценки
Обгонные маневры являются очень важным источником данных для реализации алгоритмов, определяющих положение транспортных средств в системе координат по аэрофотоснимкам. На основе обнаруженных траекторий транспортных средств кафедра дорожного планирования и проектирования дорог Технического университета Дрездена разрабатывает модель поведения водителей при обгонах. Анализ данных, включающих более 600 последовательностей обгонов, требует максимально возможной автоматизации.
Результаты, касающиеся желаемых траекторий, объединяются при постобработке. Алгоритмы обработки изображений реализованы с использованием среды разработки Halcon. После расчета неискаженных изображений необходимо их стабилизировать, чтобы компенсировать движения, производимые HORUS ® . Последующая оценка фона является основой для обнаружения транспортного средства.
Во время постобработки ошибочные обнаружения удаляются, а оставшиеся координаты сопоставляются с соответствующими транспортными средствами.Полученные траектории можно использовать в дальнейшем, например, для построения математической модели обгона.
Исправление
Процесс ректификации исправляет искажение изображения путем преобразования каждого изображения в центральную перспективу. Эта процедура облегчает дальнейшую обработку, так как форма и размеры объектов не зависят от их положения на изображении. Исправление было реализовано в среде Halcon, поддерживающей любые виды искажений. После создания регулярной сетки, представляющей геометрию изображения в центральной проекции, каждая точка сетки искажается. С помощью полученных координат и информации о размере сетки точек и исходном шаге сетки можно вывести правило сопоставления, реализующее исправление.
Присвоение значения шкалы серого выполняется для каждого пикселя экспортируемого изображения путем билинейной интерполяции.
В этом процессе для интерполяции учитываются четыре соседних значения шкалы серого вычисленного положения пикселя. При разрешении 6200 пикселей исправленное изображение превышает ширину исходного изображения в 1,6 раза. Зная об исправленном изображении, теперь возможно преобразование в мировые координаты. В зависимости от требований проекта диапазон измерения включает в себя отображение дороги, ширина которой мала по сравнению со всей проекционной поверхностью.Стабилизация
В отличие от стационарной камеры, незначительных движений изображения, вызванных многороторным БПЛА, нельзя избежать, несмотря на подвес камеры с компенсацией неровностей. Таким образом, чтобы определить положение транспортных средств, необходимо стабилизировать изображение.
В этом процессе необходимо обнаруживать и корректировать смещения и повороты между различными записанными изображениями. Одним из возможных подходов к этому является обнаружение и выравнивание участков вдоль обочины, которые остаются неизменными в процессе измерения.
Для поиска этих стационарных эталонных образцов использовалась система сопоставления на основе корреляции, предоставленная Halcon. В качестве меры сходства между данным образцом и областью поиска применялась нормированная функция взаимной корреляции. Вычисленная область максимальной корреляции, скорее всего, указывает на положение эталонного образца на изображении. Результаты, в свою очередь, составляют основу, используемую для создания областей поиска для следующих изображений. Эта процедура сокращает требуемое время вычислений по сравнению с рассмотрением более крупных постоянных областей поиска.
Сопоставление на основе корреляции устойчиво к размытости и линейным изменениям яркости. С другой стороны, процесс чувствителен к затемнению, а также к нелинейным изменениям освещения, происходящим, например, из-за облачности. По этой причине эталонные образцы автоматически обновляются через регулярные промежутки времени, так что процесс стабилизации изображения можно применять даже в погоду с переменным количеством облаков.
Оценка фона
Для автоматического обнаружения движущихся транспортных средств необходимо эталонное изображение, с которым можно сравнить анализируемое изображение. Фон сцены не содержит движущихся объектов и поэтому хорошо подходит в качестве эталона. При создании этого фонового изображения необходимо решить следующие задачи:
- В течение дня очень сложно получить изображения дорог со средней интенсивностью движения, на которых нет транспортных средств.
- Из-за переменных условий освещения фоновое изображение может меняться. Это означает, что статического эталонного изображения нет. Следовательно, фон должен оцениваться и автоматически адаптироваться к изменяющимся условиям окружающей среды. Постоянное обновление фонового изображения позволяет адаптироваться к изменениям яркости.
Из-за отклонений от желаемого угла обзора в случае порывов ветра перспективное искажение затронутых отдельных изображений будет различным.
В результате эталонное изображение будет содержать размытые области по краям. Этот эффект, который необходимо учитывать при обнаружении транспортных средств, особенно вероятен на краях дорожной разметки.Алгоритм оценки фона реализован в среде разработки Halcon. На основе изображений, которые участвуют в создании эталонного изображения, создаются многоканальные изображения для каждого цветового канала. Вычисление среднего значения каждого пикселя по соответствующему каналу с помощью процедур, доступных в Halcon, представит результат оценки фона.
Обнаружение транспортных средств
Если в качестве движущихся объектов распознаются только транспортные средства, можно определить их положение. В процессе обнаружения анализируемое изображение вычитается из эталонного изображения.
Опыт показал, что переход от цветового пространства RGB к цветовому пространству HSV имеет преимущество. В отличие от значения шкалы серого, полученного из изображения RGB, использование канала яркости HSV поддерживает надежное обнаружение транспортных средств, особенно если речь идет о разноцветных транспортных средствах.
Смежные области разностного изображения с более высокой яркостью, чем заданное пороговое значение, создают бинарное изображение, которое является основой для дальнейшего исследования. Следует принимать во внимание следующие общие характеристики отдельных зон:
- Транспортное средство может состоять из нескольких зон,
- Несколько транспортных средств могут сливаться в одну большую область,
- Обнаруженные области могут, но не обязательно, принадлежать транспортным средствам.
На следующем этапе можно применить морфологические операторы, предоставляемые Halcon, для изменения формы областей. Операция «закрытия» закрывает пробелы в областях, чтобы создать целостное изображение транспортного средства. Для этого сначала выполняется расширение, а затем эрозия внутри. Все обнаруженные области проверяются на предмет правдоподобности того, что они представляют собой транспортное средство.
Для достижения желаемого разрешения изображения рекомендуется минимальный размер 5×5 пикселей и максимальная длина 200 пикселей.
 В этой работе возможное обгоняющее транспортное средство сначала находится на основе сигналов движения. Затем кандидат идентифицируется с помощью сверточной нейронной сети (CNN… 9).0011
В этой работе возможное обгоняющее транспортное средство сначала находится на основе сигналов движения. Затем кандидат идентифицируется с помощью сверточной нейронной сети (CNN… 9).0011
 В этом документе предлагается подход, который сочетает в себе навигацию с наведением и визуальное обнаружение на основе изображений для дорожного…
В этом документе предлагается подход, который сочетает в себе навигацию с наведением и визуальное обнаружение на основе изображений для дорожного…
 е. от 15 до 120 минут в будущем).
е. от 15 до 120 минут в будущем).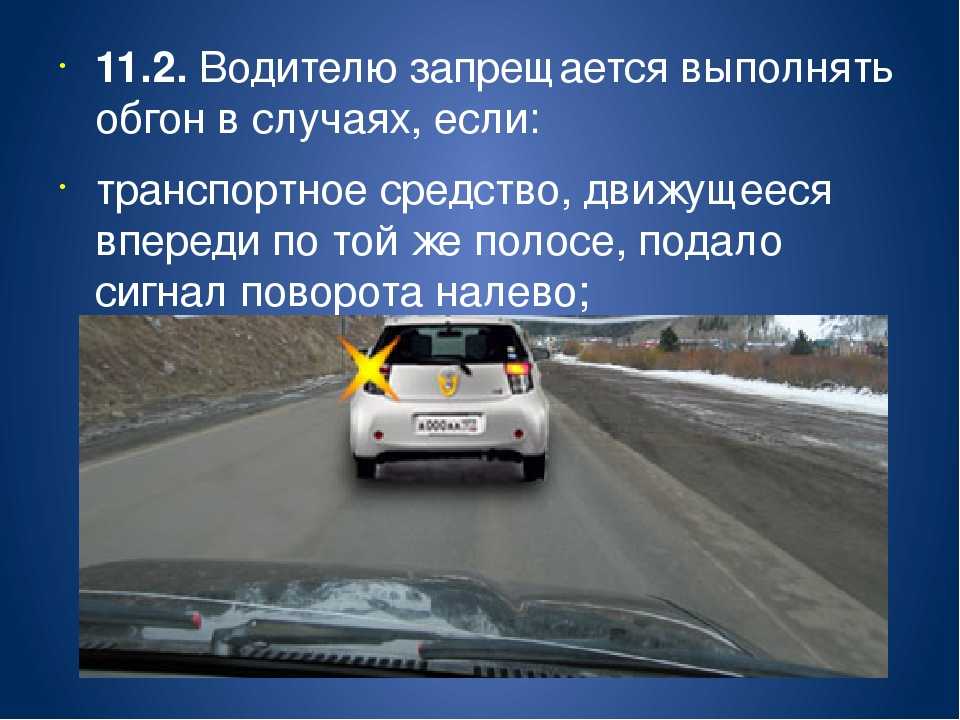



 140 точек измерения расположены на потолке и стенах. Их координаты объекта известны со стандартным отклонением 0,23 миллиметра.
140 точек измерения расположены на потолке и стенах. Их координаты объекта известны со стандартным отклонением 0,23 миллиметра. Во время постобработки ошибочные обнаружения удаляются, а оставшиеся координаты сопоставляются с соответствующими транспортными средствами.
Во время постобработки ошибочные обнаружения удаляются, а оставшиеся координаты сопоставляются с соответствующими транспортными средствами. В этом процессе для интерполяции учитываются четыре соседних значения шкалы серого вычисленного положения пикселя. При разрешении 6200 пикселей исправленное изображение превышает ширину исходного изображения в 1,6 раза. Зная об исправленном изображении, теперь возможно преобразование в мировые координаты. В зависимости от требований проекта диапазон измерения включает в себя отображение дороги, ширина которой мала по сравнению со всей проекционной поверхностью.
В этом процессе для интерполяции учитываются четыре соседних значения шкалы серого вычисленного положения пикселя. При разрешении 6200 пикселей исправленное изображение превышает ширину исходного изображения в 1,6 раза. Зная об исправленном изображении, теперь возможно преобразование в мировые координаты. В зависимости от требований проекта диапазон измерения включает в себя отображение дороги, ширина которой мала по сравнению со всей проекционной поверхностью.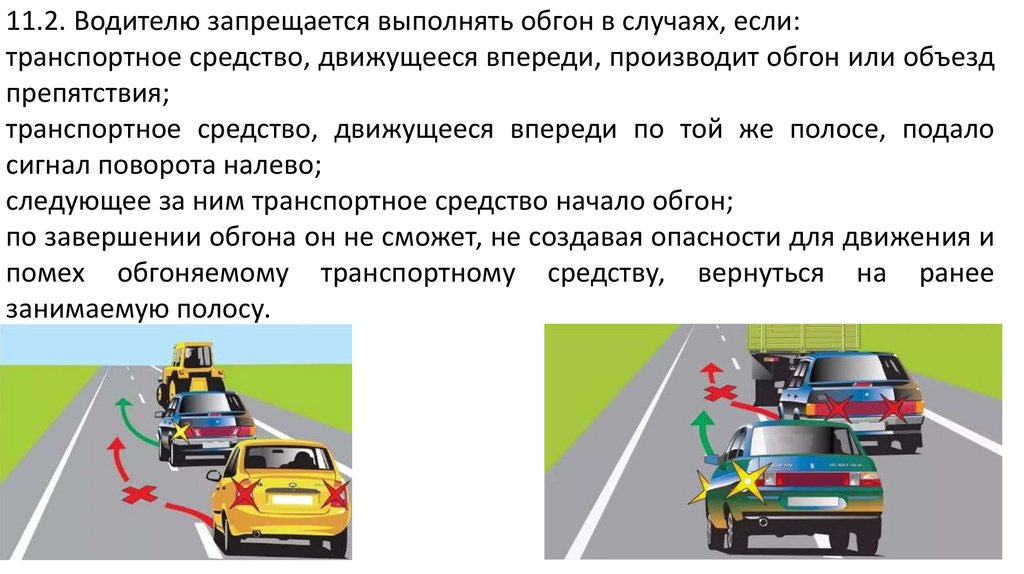
 В результате эталонное изображение будет содержать размытые области по краям. Этот эффект, который необходимо учитывать при обнаружении транспортных средств, особенно вероятен на краях дорожной разметки.
В результате эталонное изображение будет содержать размытые области по краям. Этот эффект, который необходимо учитывать при обнаружении транспортных средств, особенно вероятен на краях дорожной разметки.