Содержание
Справочные материалы о кондиционерах
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.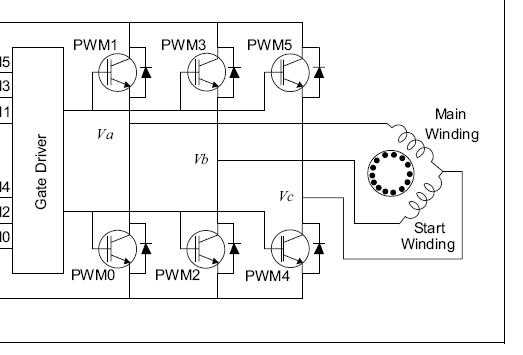
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
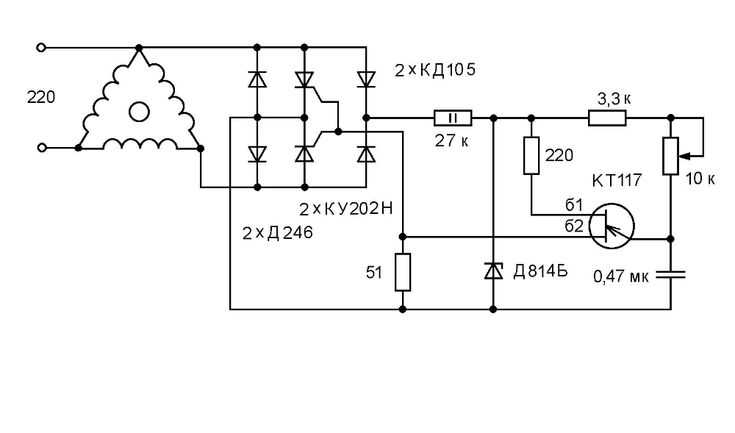
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.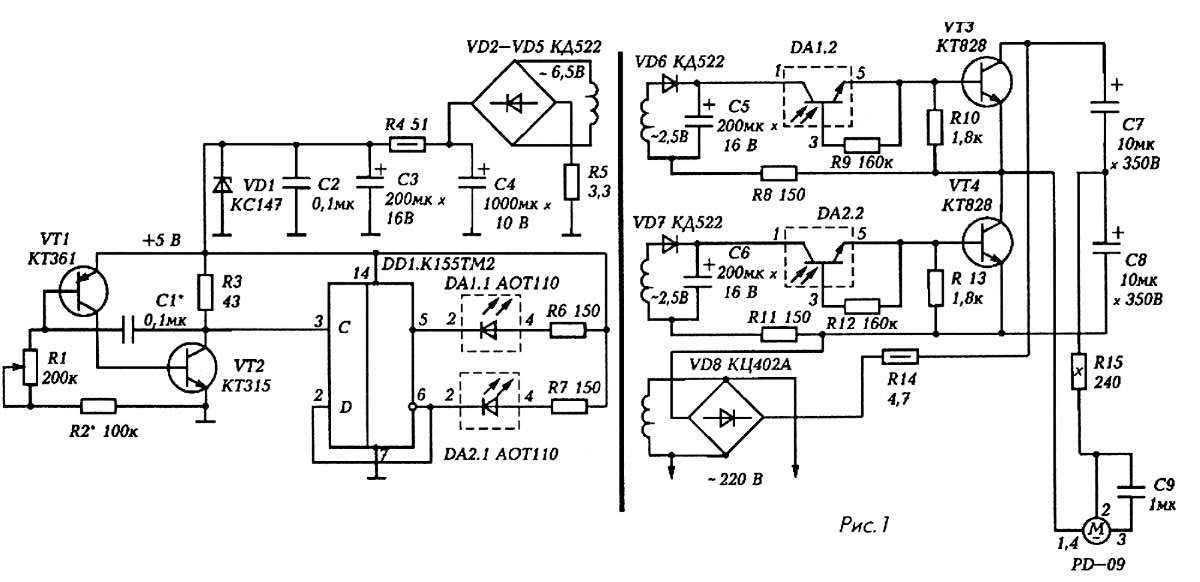
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.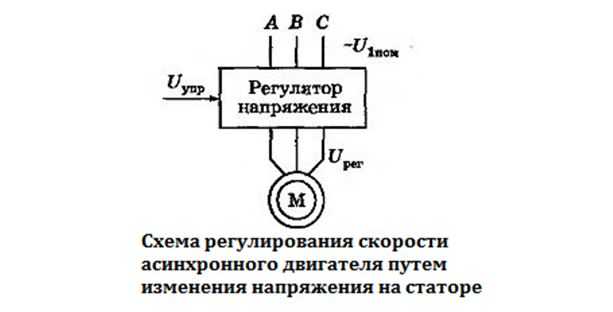
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого.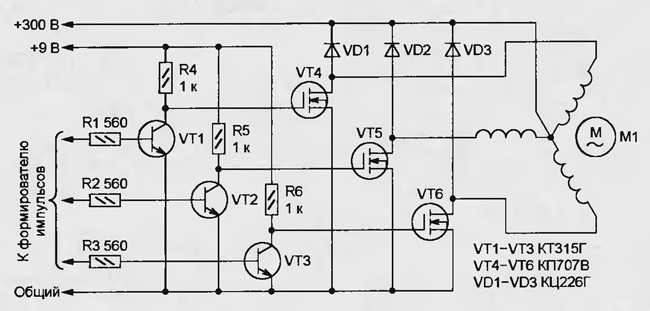 Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
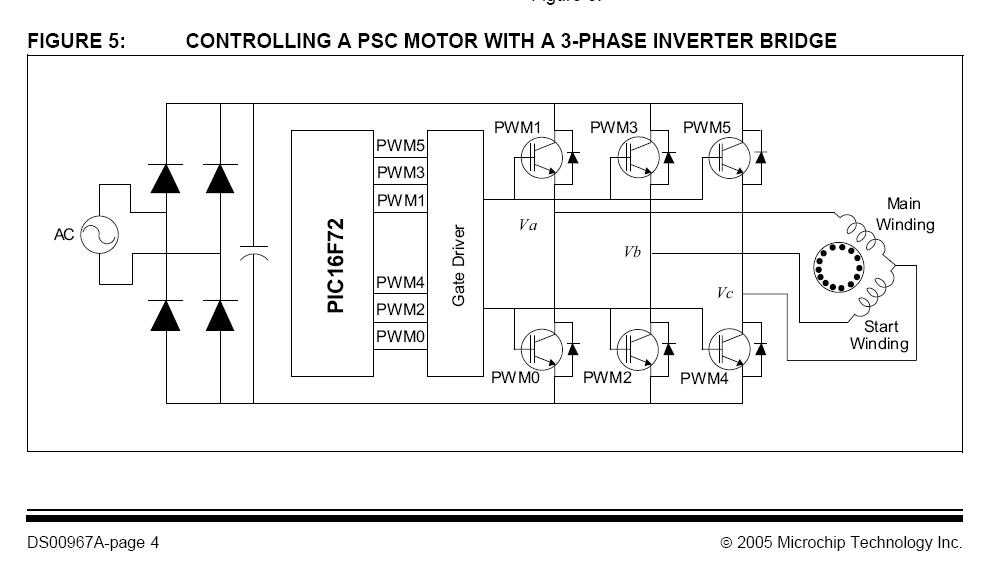
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателямиРегулирование скорости асинхронного двигателя
Асинхронный двигатель
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором.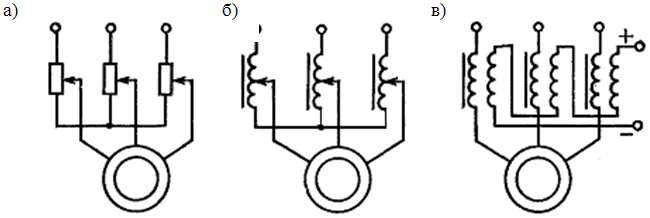 При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
Схема регулятора скорости 3-фазного асинхронного двигателя
В этом посте мы обсуждаем создание простой схемы регулятора скорости 3-фазного асинхронного двигателя, которую также можно применять для однофазного асинхронного двигателя или буквально для любого типа двигателя переменного тока.
Когда дело доходит до управления скоростью асинхронных двигателей, обычно используются матричные преобразователи, включающие множество сложных ступеней, таких как LC-фильтры, двунаправленные массивы переключателей (с использованием IGBT) и т. д.
д.
Все они используются для окончательного достижения прерванный сигнал переменного тока, рабочий цикл которого можно регулировать с помощью сложной схемы микроконтроллера, что, наконец, обеспечивает требуемое управление скоростью двигателя.
Однако мы можем поэкспериментировать и попытаться реализовать управление скоростью 3-фазного асинхронного двигателя с помощью гораздо более простой концепции, используя усовершенствованные ИС оптопары детектора пересечения нуля, силовой симистор и схему ШИМ.
Содержание
Благодаря оптронам серии MOC схемы управления симисторами чрезвычайно безопасны и просты в настройке, а также обеспечивают беспроблемную интеграцию ШИМ для предусмотренных элементов управления.
В одном из моих предыдущих постов я обсуждал простую схему контроллера плавного пуска двигателя с ШИМ, в которой реализована микросхема MOC3063 для обеспечения эффективного плавного пуска подключенного двигателя.
Здесь мы также используем идентичный метод для реализации предложенной схемы трехфазного регулятора скорости асинхронного двигателя.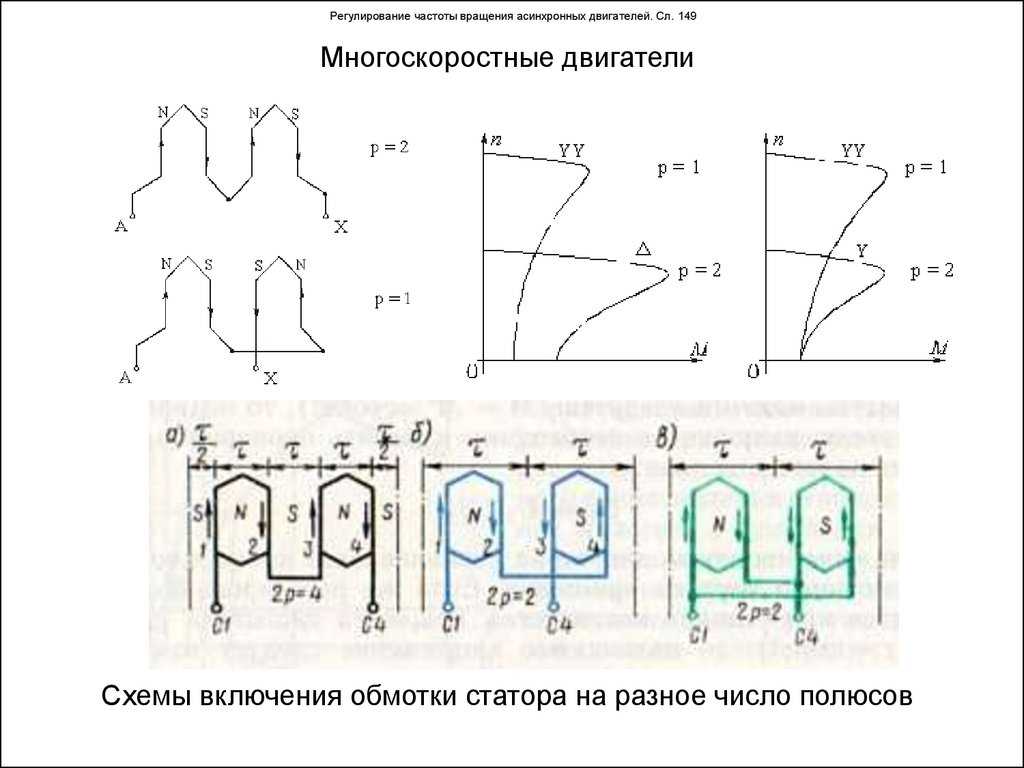 На следующем рисунке показано, как это можно сделать: режим регулятора, а входная сторона интегрирована с простой схемой ШИМ IC 555.
На следующем рисунке показано, как это можно сделать: режим регулятора, а входная сторона интегрирована с простой схемой ШИМ IC 555.
3 цепи MOC настроены на работу с 3-фазным входом переменного тока и подачу его на подключенный асинхронный двигатель.
ШИМ-вход на изолированной стороне управления светодиодами оптопары определяет коэффициент прерывания трехфазного входа переменного тока, который обрабатывается MOC ICS.
Использование ШИМ-контроллера IC 555 (переключение при нулевом напряжении)
Это означает, что путем регулировки ШИМ-потенциометра, связанного с 555 IC, можно эффективно управлять скоростью асинхронного двигателя.
Выходной сигнал на выводе №3 имеет переменный рабочий цикл, который, в свою очередь, соответствующим образом переключает выходные симисторы, что приводит либо к увеличению среднеквадратичного значения переменного тока, либо к его уменьшению.
Увеличение среднеквадратичного значения с помощью более широких ШИМ позволяет получить более высокую скорость двигателя, в то время как уменьшение среднеквадратичного значения переменного тока с помощью более узких ШИМ дает противоположный эффект, т. е. вызывает пропорциональное замедление двигателя.
е. вызывает пропорциональное замедление двигателя.
Вышеуказанные функции реализованы с большой точностью и безопасностью, поскольку ИС имеют множество внутренних сложных функций, специально предназначенных для управления симисторами и тяжелыми индуктивными нагрузками, такими как асинхронные двигатели, соленоиды, клапаны, контакторы, полупроводниковые реле и т. д.
ИС также обеспечивает полностью изолированную работу каскада постоянного тока, что позволяет пользователю производить настройку, не опасаясь поражения электрическим током.
Этот принцип можно также эффективно использовать для управления скоростью однофазного двигателя, используя одну микросхему MOC вместо трех. Верхнюю схему ШИМ IC555 можно отрегулировать для получения рабочего цикла 50% на гораздо более высокой частоте, в то время как нижнюю схему ШИМ можно использовать для реализации операции управления скоростью асинхронного двигателя посредством регулировки соответствующего потенциометра.
Рекомендуется, чтобы эта IC 555 имела относительно более низкую частоту, чем верхняя схема IC 555. Это можно сделать, увеличив емкость конденсатора на выводе № 6/2 примерно до 100 нФ.
Это можно сделать, увеличив емкость конденсатора на выводе № 6/2 примерно до 100 нФ.
ПРИМЕЧАНИЕ: ДОБАВЛЕНИЕ ПОДХОДЯЩИХ ИНДУКТОРОВ ПОСЛЕДОВАТЕЛЬНО С ФАЗНЫМИ ПРОВОДАМИ МОЖЕТ ЗНАЧИТЕЛЬНО УЛУЧШИТЬ ХАРАКТЕРИСТИКИ РЕГУЛИРОВАНИЯ СКОРОСТИ СИСТЕМЫ.
Лист данных для MOC3061
Предполагаемая форма волны и управление фазой с использованием вышеуказанной концепции:
Описанный выше метод управления трехфазным асинхронным двигателем на самом деле довольно грубый, поскольку он имеет нет управления В/Гц .
Он просто использует включение/выключение сети с разной скоростью для получения средней мощности двигателя и управления скоростью путем изменения этого среднего переменного тока двигателя.
Представьте, что вы включаете/выключаете двигатель вручную 40 или 50 раз в минуту. Это приведет к тому, что ваш двигатель замедлится до некоторого относительного среднего значения, но будет двигаться непрерывно. Описанный выше принцип работает точно так же.
Более технический подход заключается в разработке схемы, которая обеспечивает надлежащий контроль соотношения В/Гц и автоматически регулирует его в зависимости от скорости скольжения или любых колебаний напряжения.
Для этого мы в основном используем следующие каскады:
- H-мостовая или полномостовая схема драйвера IGBT
- 3-фазный каскад генератора для питания полной мостовой схемы
- Процессор В/Гц ШИМ
Использование полного моста Цепь управления IGBT
Если процедуры настройки описанной выше конструкции на основе симистора кажутся вам пугающими, можно попробовать следующее полномостовое управление скоростью асинхронного двигателя на основе ШИМ:
— Мостовой драйвер IC IRS2330 (последняя версия 6EDL04I06NT), который имеет все встроенные функции для обеспечения безопасной и идеальной работы трехфазного двигателя.
Микросхеме требуется только синхронизированный 3-фазный логический вход на ее выводах HIN/LIN для генерации требуемого 3-фазного колебательного выхода, который, наконец, используется для работы полной мостовой сети IGBT и подключенного 3-фазного двигателя.
ШИМ-инжекция управления скоростью реализована через 3 отдельных полумостовых каскада драйверов NPN/PNP, управляемых питанием SPWM от генератора ШИМ IC 555, как показано в наших предыдущих проектах. Этот уровень ШИМ может в конечном итоге использоваться для управления скоростью асинхронного двигателя.
Прежде чем мы изучим фактический метод управления скоростью для асинхронного двигателя, давайте сначала поймем, как можно добиться автоматического управления V/Hz с помощью нескольких схем IC 555, как описано ниже
Схема автоматического процессора V/Hz PWM (Замкнутый контур)
В приведенных выше разделах мы изучили конструкции, которые помогут асинхронному двигателю двигаться со скоростью, указанной производителем, но он не будет регулироваться в соответствии с постоянным соотношением В/Гц, если только не будет применена следующая ШИМ. процессор интегрирован с входным каналом H-Bridge PWM.
Приведенная выше схема представляет собой простой генератор ШИМ, использующий пару IC 555. IC1 генерирует частоту ШИМ, которая преобразуется в треугольные волны на выводе № 6 IC2 с помощью R4/C3.
IC1 генерирует частоту ШИМ, которая преобразуется в треугольные волны на выводе № 6 IC2 с помощью R4/C3.
Эти треугольные волны сравниваются с синусоидальной пульсацией на выводе № 5 микросхемы IC2. Эти выборочные пульсации получаются путем выпрямления трехфазной сети переменного тока в пульсации переменного тока 12 В и подаются на контакт № 5 микросхемы IC2 для необходимой обработки.
При сравнении двух сигналов на выводе №3 микросхемы IC2 генерируется ШИМ соответствующего размера, который становится управляющим ШИМ для сети H-моста.
Как работает схема V/Hz
При включении питания конденсатор на выводе № 5 начинает генерировать нулевое напряжение на выводе № 5, что приводит к наименьшему значению SPWM в схеме H-моста, что, в свою очередь, включает асинхронный двигатель для запуска с медленным постепенным плавным пуском.
По мере зарядки этого конденсатора потенциал на контакте № 5 возрастает, что пропорционально увеличивает SPWM и позволяет двигателю постепенно набирать скорость.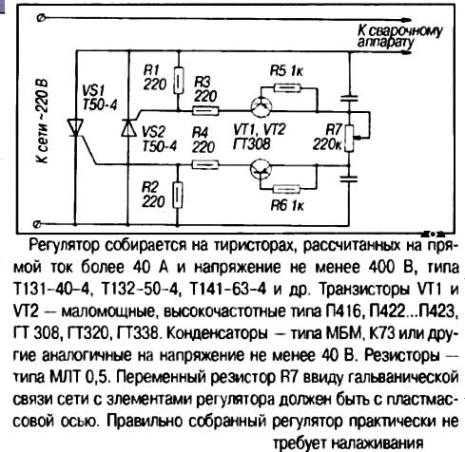
Мы также видим цепь обратной связи тахометра, которая также интегрирована с контактом № 5 микросхемы IC2.
Этот тахометр отслеживает скорость вращения ротора или скорость скольжения и генерирует дополнительное напряжение на выводе № 5 микросхемы IC2.
Теперь, когда скорость двигателя увеличивается, скорость скольжения пытается синхронизироваться с частотой статора и при этом начинает набирать скорость.
Это увеличение индукционного скольжения пропорционально увеличивает напряжение тахометра, что, в свою очередь, заставляет IC2 увеличивать выходной сигнал SPWM, а это, в свою очередь, еще больше увеличивает скорость двигателя.
Вышеупомянутая регулировка пытается поддерживать соотношение В/Гц на довольно постоянном уровне до тех пор, пока, наконец, SPWM от IC2 не сможет больше увеличиваться.
В этот момент скорость скольжения и скорость статора становятся установившимися и сохраняются до тех пор, пока входное напряжение или скорость скольжения (из-за нагрузки) не изменятся.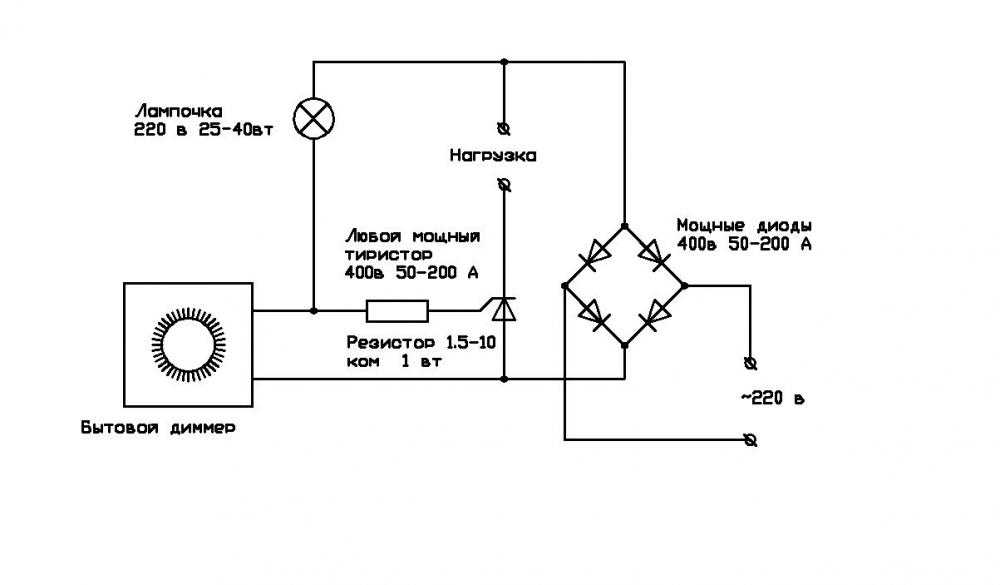 В случае их изменения схема процессора В/Гц снова вступает в действие и начинает регулировать соотношение для поддержания оптимального отклика скорости асинхронного двигателя.
В случае их изменения схема процессора В/Гц снова вступает в действие и начинает регулировать соотношение для поддержания оптимального отклика скорости асинхронного двигателя.
Тахометр
Схема тахометра также может быть дешево построена с использованием следующей простой схемы и объединена с описанными выше этапами схемы:
Как реализовать управление скоростью
В предыдущих абзацах мы поняли процесс автоматического регулирования, который может быть достигнут путем интеграции обратной связи тахометра в схему контроллера авторегулирования SPWM.
Теперь давайте узнаем, как можно управлять скоростью асинхронного двигателя, изменяя частоту, что в конечном итоге заставит SPWM снижаться и поддерживать правильное соотношение В/Гц.
Следующая диаграмма поясняет этап регулирования скорости:
Здесь мы видим схему трехфазного генератора, использующую микросхему IC 4035, частота фазового сдвига которой может изменяться путем изменения тактового входа на выводе № 6.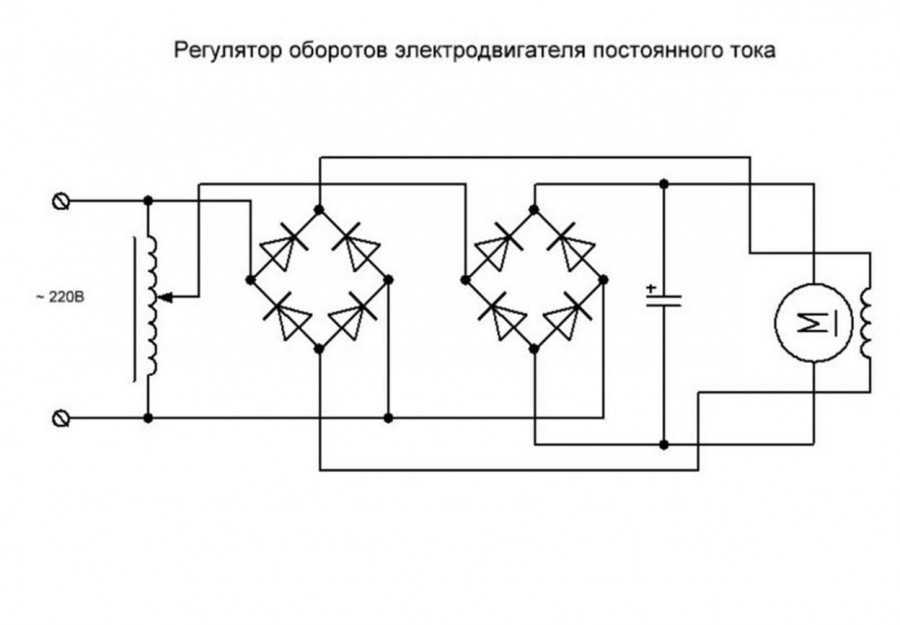
3-фазные сигналы подаются на логические элементы 4049 IC для создания требуемых каналов HIN, LIN для сети драйверов полного моста.
Это означает, что, соответствующим образом изменяя тактовую частоту IC 4035, мы можем эффективно изменить рабочую трехфазную частоту асинхронного двигателя.
Это реализовано с помощью простой нестабильной схемы IC 555, которая подает регулируемую частоту на контакт № 6 IC 4035 и позволяет регулировать частоту с помощью подключенного потенциометра 100K. Конденсатор C необходимо рассчитать таким образом, чтобы регулируемый диапазон частот находился в пределах правильных характеристик подключенного асинхронного двигателя.
При изменении потенциометра частоты эффективная частота асинхронного двигателя также изменяется, что соответственно изменяет скорость двигателя.
Например, когда частота снижается, скорость двигателя снижается, что, в свою очередь, приводит к пропорциональному снижению напряжения на выходе тахометра.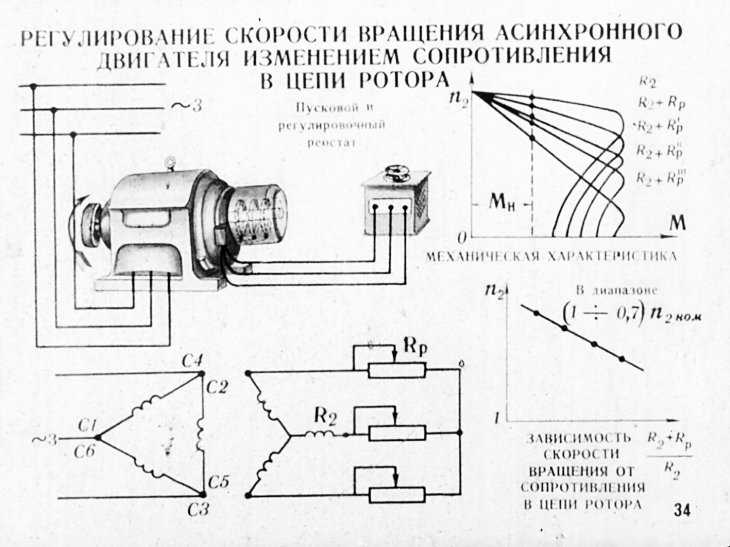
Это пропорциональное уменьшение выходного сигнала тахометра заставляет SPWM сужаться и тем самым пропорционально снижает выходное напряжение двигателя.
Это действие, в свою очередь, обеспечивает поддержание соотношения В/Гц при управлении скоростью асинхронного двигателя посредством управления частотой.
Предупреждение. Приведенная выше концепция разработана только на основе теоретических предположений, действуйте с осторожностью.
Если у вас есть какие-либо дополнительные сомнения относительно конструкции этого трехфазного регулятора скорости асинхронного двигателя, вы можете опубликовать их в своих комментариях.
. Бесколлекторная электрическая машина всегда оценивалась положительно за Недостатком неколлекторных двигателей, однако, была их неспособность Следующие цепи управления интересны тем, что они преодолевают Симисторная схема управления скоростью для асинхронных двигателей Симисторная схема управления скоростью для асинхронных двигателей, показанная на РИС. 1 РИС. Асинхронные двигатели с пуском от сопротивления и пуском от конденсатора могут управляться симистором Эта схема значительно превосходит схему с одним тиристором и фазовым управлением. «демпферная сеть» RC, подключенная к симистору, как правило, не |
 Некоторые из этих машин имеют скользящие контакты, но они
Некоторые из этих машин имеют скользящие контакты, но они
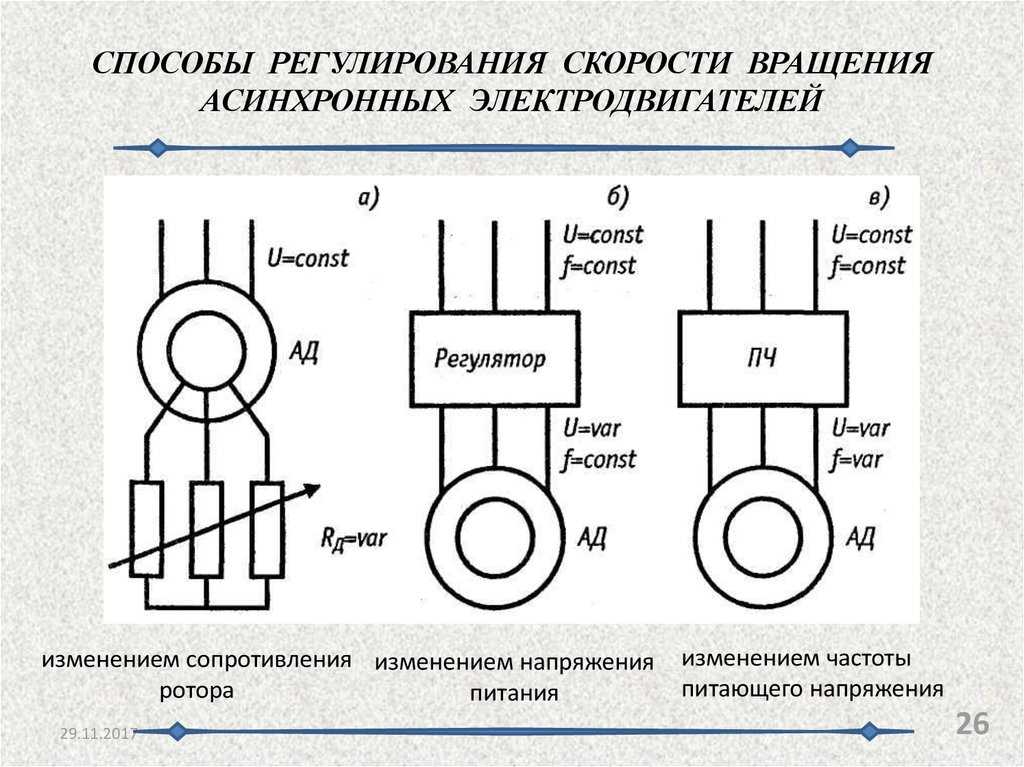 Схема на фиг.
Схема на фиг.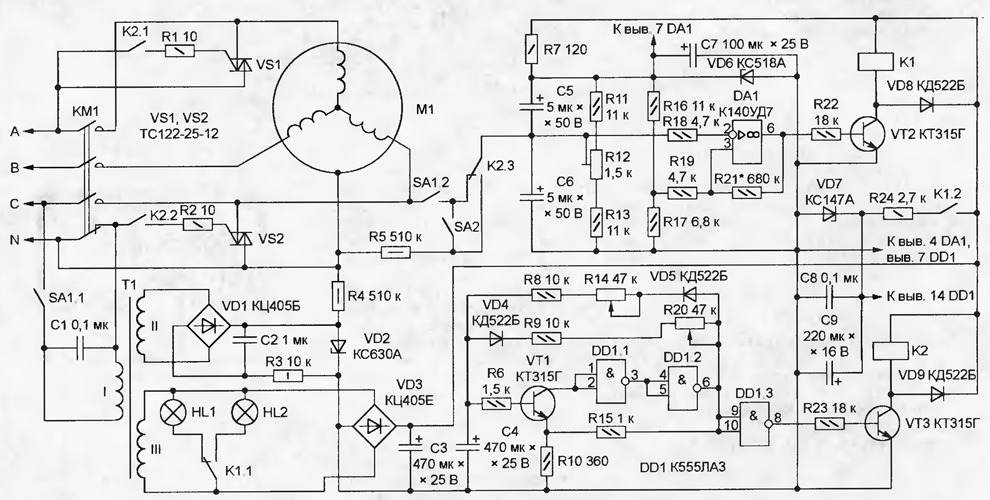 1 Скорость симистора — схема управления асинхронными двигателями. По РКА. (А.
1 Скорость симистора — схема управления асинхронными двигателями. По РКА. (А.