Содержание
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения.
 Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
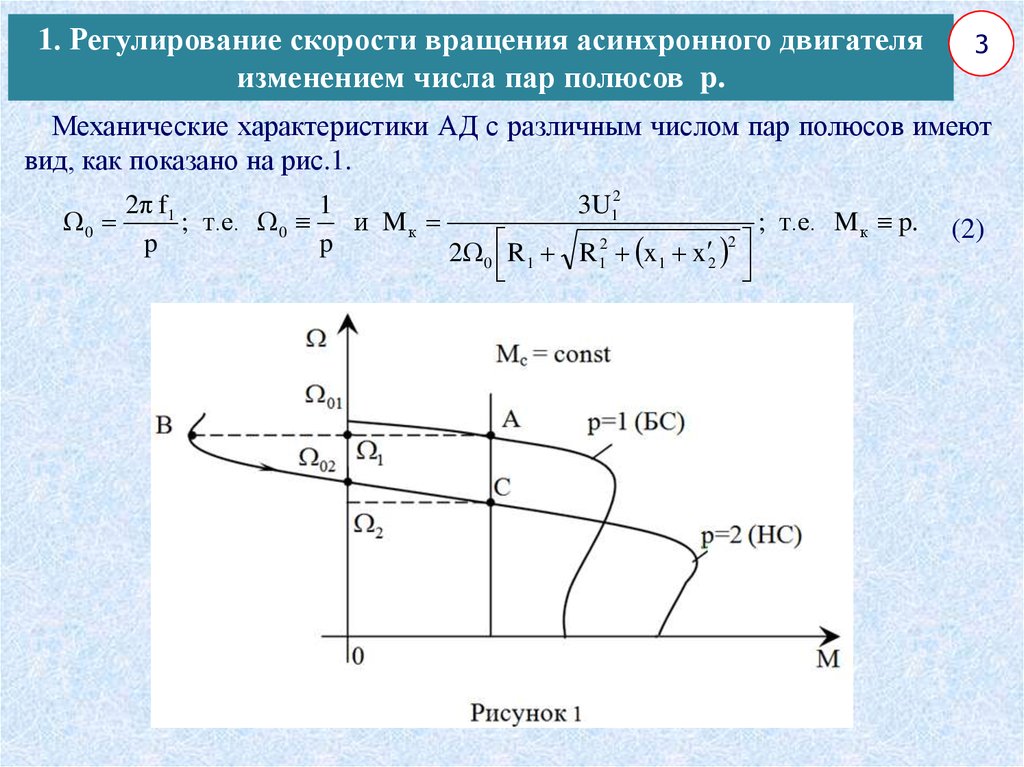
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.

В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по — новому, или как правильно выбрать котел для автономного отопления
|
Торцевые уплотнения, причины выхода со строя в насосах →
Регулирование частоты вращения асинхронного двигателя
Регулирование частоты вращения асинхронного двигателя определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых он используются. Оно характеризуется следующими основными показателями.
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя nmах к его минимальной частоте вращения nmin:
D=nmax/nmin.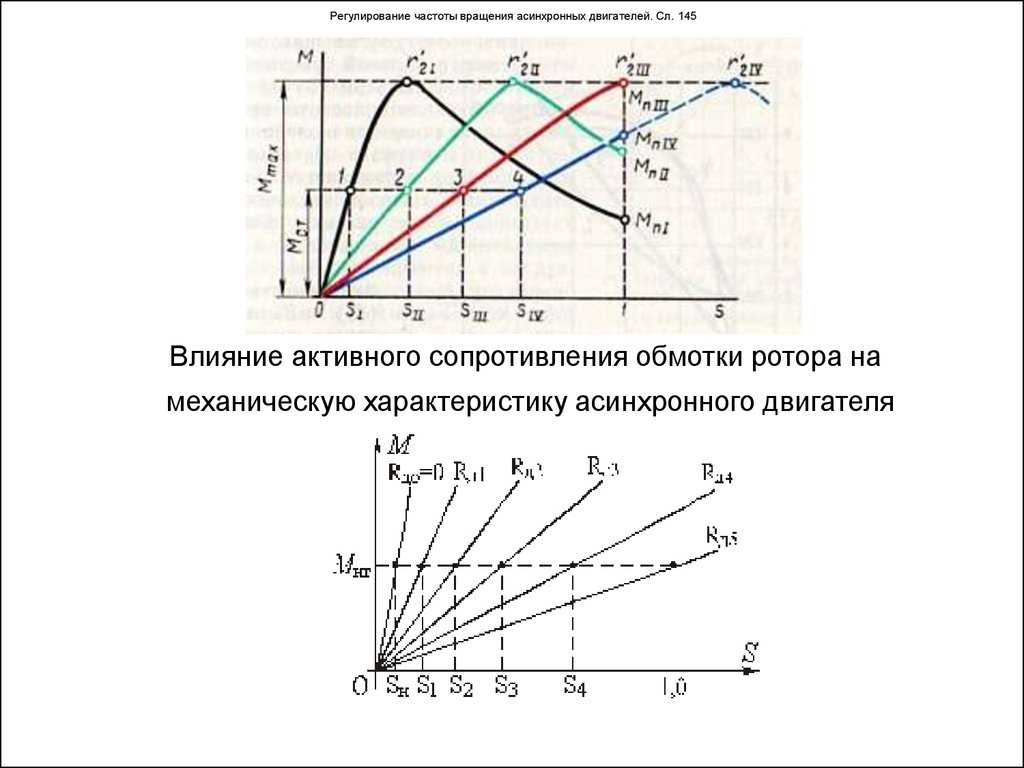 (54)
(54)
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования). При номинальных условиях работы (напряжении и частоте питающей сети) асинхронный двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения асинхронного двигателя выше и ниже естественной характеристики.
Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронного двигателя может производиться способом воздействия на него со стороны статора или со стороны ротора.
Чтобы рассмотреть возможные способы регулирования частоты вращения, сначала получим ее выражение. В соответствии с приведенными ранее формулами (3), (4) можно записать, что частота вращения ротора n, об/мин, равна:
В соответствии с приведенными ранее формулами (3), (4) можно записать, что частота вращения ротора n, об/мин, равна:
(55)
где f1 — частота питающей сети, Гц; р — число пар полюсов двигателя; s — скольжение, отн. ед.
Из формулы (55) следует, что существуют три основных способа регулирования частоты вращения:
- изменением частоты f1 питающего двигатель напряжения;
- изменением числа пар полюсов р;
- изменением скольжения s.
Воздействие на асинхронный двигатель может осуществляться как со стороны статора, так и со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Методы управления скоростью асинхронного двигателя
Асинхронный двигатель практически является двигателем с постоянной скоростью, это означает, что для всего диапазона нагрузки изменение скорости двигателя довольно мало. Скорость шунтирующего двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и плохим коэффициентом мощности. Поскольку асинхронные двигатели широко используются, их регулирование скорости может потребоваться во многих приложениях. Ниже описаны различные методы управления скоростью асинхронного двигателя .
Скорость шунтирующего двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и плохим коэффициентом мощности. Поскольку асинхронные двигатели широко используются, их регулирование скорости может потребоваться во многих приложениях. Ниже описаны различные методы управления скоростью асинхронного двигателя .
Регулятор скорости асинхронного двигателя со стороны статора
1. Изменением приложенного напряжения:
Из уравнения крутящего момента асинхронного двигателя,
Сопротивление ротора R 2 постоянно и если скольжение s мало, то (sX 2 ) 2 настолько мало, что им можно пренебречь. Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС ротора, а E 2 ∝ В
Таким образом, T ∝ sV 2 , а значит, при уменьшении подаваемого напряжения развиваемый момент уменьшается. Следовательно, для обеспечения одного и того же момента нагрузки скольжение увеличивается с уменьшением напряжения и, следовательно, скорость уменьшается. Этот метод является самым простым и дешевым, но до сих пор применяется редко, т. к. для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
Следовательно, для обеспечения одного и того же момента нагрузки скольжение увеличивается с уменьшением напряжения и, следовательно, скорость уменьшается. Этот метод является самым простым и дешевым, но до сих пор применяется редко, т. к. для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
- большое изменение напряжения питания приведет к большому изменению плотности потока, следовательно, это нарушит магнитные условия двигателя.
2. При изменении приложенной частоты
Синхронная скорость вращающегося магнитного поля асинхронного двигателя определяется выражением
где, f = частота питания и P = количество полюсов статора.
Следовательно, синхронная скорость изменяется при изменении частоты питания. Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за уменьшения реактивного сопротивления. И если частота увеличивается сверх номинального значения, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за уменьшения реактивного сопротивления. И если частота увеличивается сверх номинального значения, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
3. Постоянная V/F-регулировка асинхронного двигателя
Это наиболее популярный метод управления скоростью асинхронного двигателя. Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре будет стремиться к насыщению. Это вызовет чрезмерный ток статора и искажение волны потока статора. Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный поток в воздушном зазоре. Величина потока статора пропорциональна соотношению напряжения статора и частоты.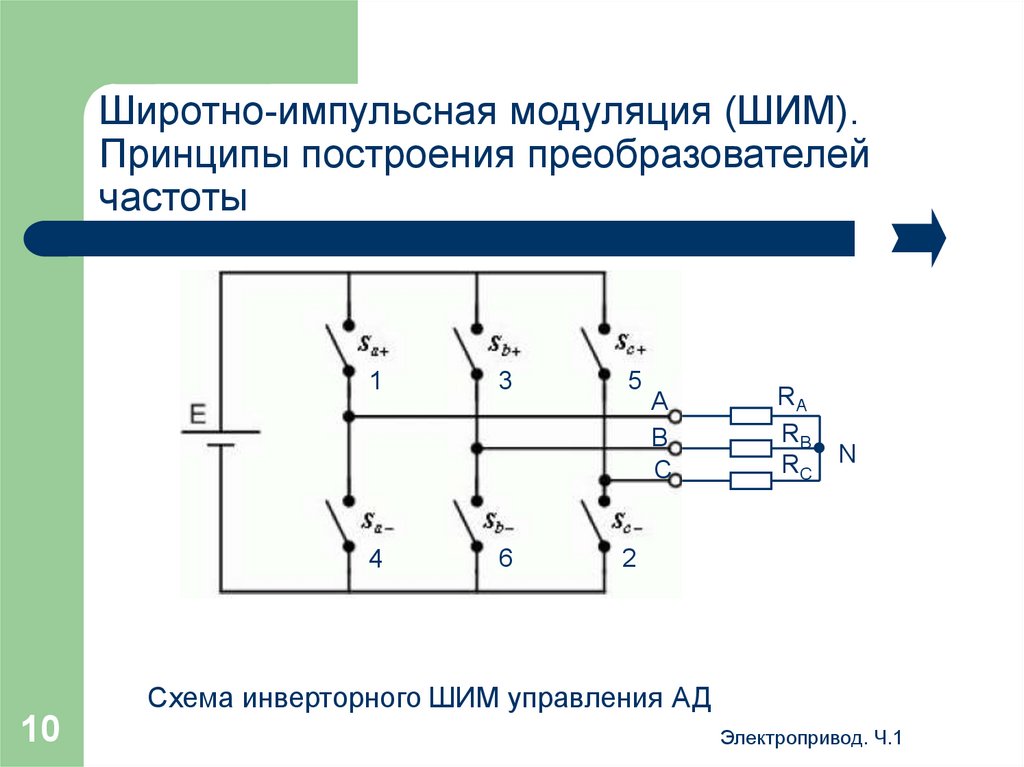 Следовательно, если отношение напряжения к частоте поддерживается постоянным, поток остается постоянным. Кроме того, при сохранении постоянной V/F развиваемый крутящий момент остается примерно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».
Следовательно, если отношение напряжения к частоте поддерживается постоянным, поток остается постоянным. Кроме того, при сохранении постоянной V/F развиваемый крутящий момент остается примерно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».
4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости видно, что синхронную скорость (и, следовательно, рабочую скорость) можно изменить, изменив количество полюсов статора. Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается за счет наматывания двух или более независимых статорных обмоток на разное число полюсов в одних и тех же пазах.
Например, статор намотан двумя трехфазными обмотками, одна на 4 полюса, а другая на 6 полюсов.
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-полюсной обмотки, Ns = 120*50/4 = 1500 об/мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120*50/6 = 1000 об/мин
Регулятор скорости со стороны ротора:
1. Управление реостатом ротора
Этот метод подобен способу управления якорным реостатом шунтового двигателя постоянного тока. Но этот метод применим только к двигателям с контактными кольцами, так как добавление внешнего сопротивления в ротор двигателей с короткозамкнутым ротором невозможно.
2. Каскадный режим
В этом методе управления скоростью используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель питается от ЭДС индукции в первом двигателе через токосъемные кольца. Расположение показано на следующем рисунке.
Расположение показано на следующем рисунке.
Двигатель А называется основным, а двигатель В – вспомогательным.
Пусть, N с1 = частота двигателя A
N с2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B
N = скорость установки и одинаковая для обоих двигателей
Теперь f = частота питания 9008 двигателя A, S 1 = (N с1 — N) / N с1 .
частота ЭДС ротора в двигателе А, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС ротора
поэтому, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .
Теперь введите значение S 1 = (N s1 — N) / N s1
На холостом ходу скорость вспомогательного ротора почти равна его синхронной скорости.
т.е. N = N s2 .
из приведенных выше уравнений можно получить, что
С помощью этого метода можно получить четыре различных скорости
1. когда работает только двигатель А, соответствующая скорость = .Ns1 = 120f / P 1
2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. если выполняется накопительное каскадирование, скорость установки = N = 120f / (P 1 + P 2 )
4. если выполнено дифференциальное каскадирование, скорость установки = N = 120f (P 1 — P 2 )
3. Вводом ЭДС в цепь ротора
В этом методе скорость асинхронного двигателя регулируется путем подачи напряжения в цепь ротора. Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений на фазу инжектируемой ЭДС нет. Если мы введем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличено.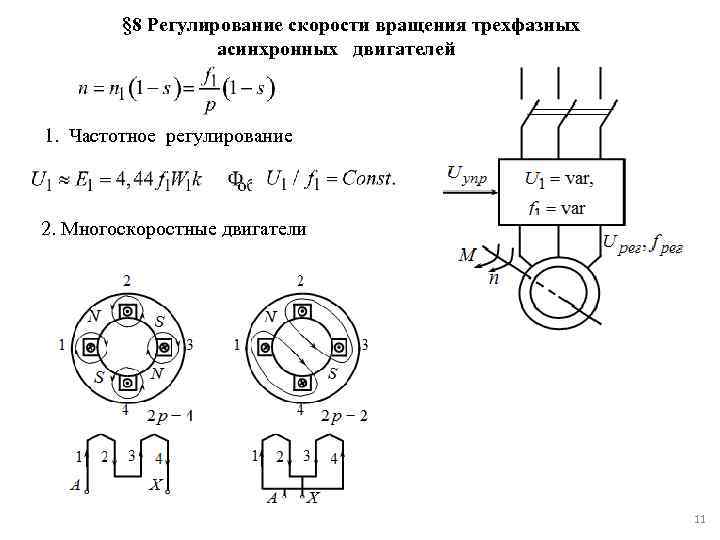 Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится. Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.
Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится. Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.
ЧРП или симистор для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются с помощью трехфазного двигателя и инвертора или частотно-регулируемого привода. Этот пост в блоге также представляет еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе управления скоростью асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (ЧРП).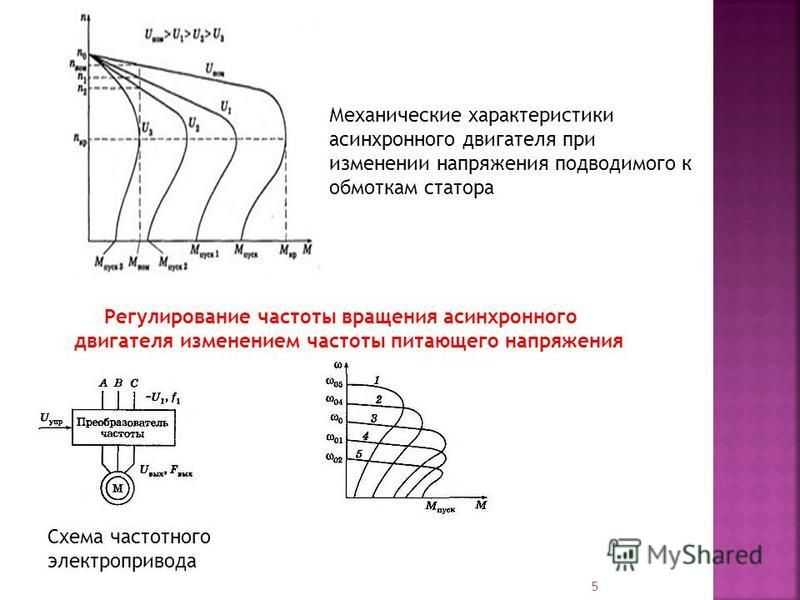 Я больше всего знаком с серией Fuji Electric FRENIC Mini C2.
Я больше всего знаком с серией Fuji Electric FRENIC Mini C2.
ЧРП Fuji Electric FRENIC Mini серии C2
Как это устройство управляет скоростью двигателя переменного тока? Давайте сначала поймем, почему двигатель будет работать с определенной скоростью. С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного питания (Гц). При частоте 60 Гц двигатель будет работать со скоростью 1800 об/мин.
Преобразователь частоты управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Обычно от двигателя не поступает обратной связи; хотя некоторые приводы используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность только из-за огромного количества компонентов. Такие функции, как динамическое увеличение крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Обратите внимание на его сложность только из-за огромного количества компонентов. Такие функции, как динамическое увеличение крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Один из недостатков использования частотно-регулируемых приводов заключается в том, что они могут стать дорогими и сложными для измерения. Также требуется 3-фазный асинхронный двигатель переменного тока с номинальным режимом работы инвертора или, по крайней мере, с режимом непрерывного режима работы. Если двигатель оснащен тормозным механизмом, он обычно снижает рабочий цикл. Раньше я видел на рынке частотно-регулируемые приводы для однофазных двигателей, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Другой способ управления скоростью однофазных асинхронных двигателей переменного тока?
Теперь рассмотрим еще один метод управления скоростью. Взгляните на кривую скорости крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запустится со скоростью 0 об/мин, затем разгонится до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорости-крутящего момента. Если момент нагрузки остается прежним, а входное напряжение уменьшается со 100 В до 90 В, скорость двигателя снижается. Да, можно использовать напряжение для управления скоростью двигателя переменного тока .
Двигатель запустится со скоростью 0 об/мин, затем разгонится до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорости-крутящего момента. Если момент нагрузки остается прежним, а входное напряжение уменьшается со 100 В до 90 В, скорость двигателя снижается. Да, можно использовать напряжение для управления скоростью двигателя переменного тока .
ПРИМЕЧАНИЕ. Максимальная скорость составляет ~1500 об/мин, поскольку входная мощность составляет 50 Гц. Для двигателей с частотой 60 Гц 1500 об/мин будут равны 1800 об/мин.
Тем не менее, вы можете видеть, что скорость не сильно снижается при падении напряжения на 10В. Если напряжение уменьшится слишком сильно, двигатель может работать в нестабильной области (менее ~ 1000 об/мин) и, возможно, заглохнуть. В идеале вы действительно хотите, чтобы двигатель работал на оптимальной номинальной скорости для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока.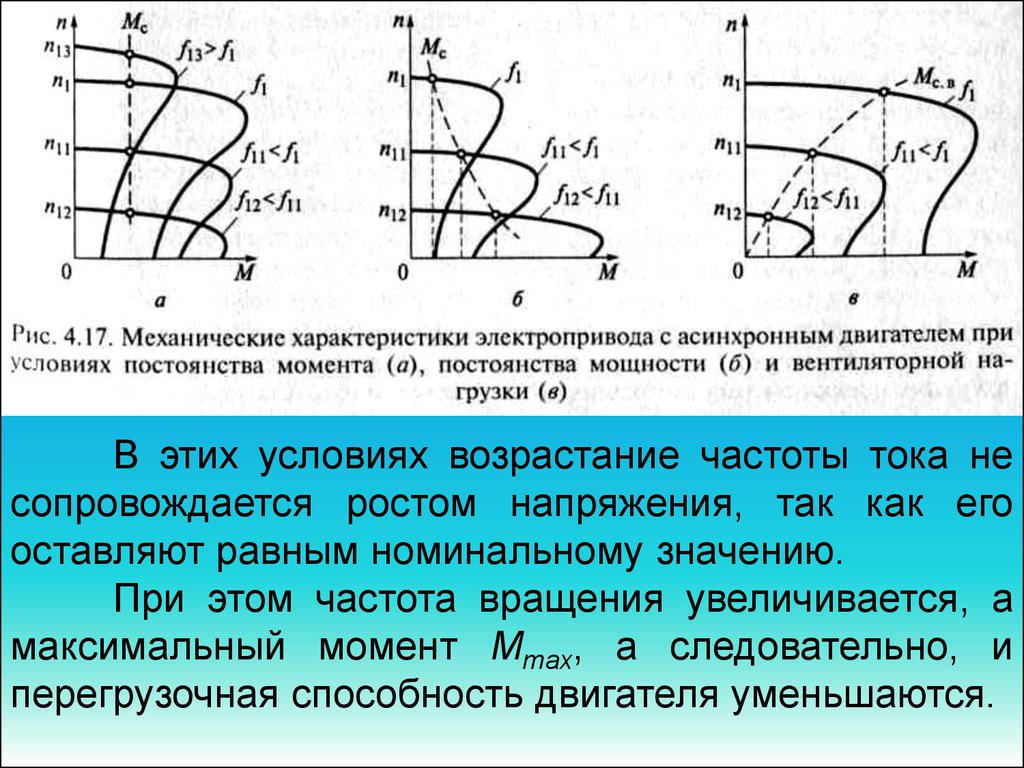 Однако диапазон оборотов регулирования скорости намного шире для коллекторных двигателей постоянного тока.
Однако диапазон оборотов регулирования скорости намного шире для коллекторных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи для замыкания контура между двигателем и регулятором скорости. Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Компания Oriental Motor использует тахогенераторы для замыкания контура между нашими двигателями с регулируемой скоростью переменного тока и регуляторами скорости, такими как серия DSC или серия US2. Тахогенератор, он же тахометр, генерирует напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи, чтобы поддерживать точность скорости на уровне ±1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кто заинтересован, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем симистор для управления напряжением. Мы также используем однополупериодный выпрямитель.
Мы также используем однополупериодный выпрямитель.
Здесь показано, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного проще, чем у ЧРП, двигатели переменного тока с регулированием скорости являются более экономичным вариантом по сравнению с двигателями переменного тока с ЧРП. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с частотно-регулируемым приводом, где частотно-регулируемый привод переключается с гораздо большей скоростью.
Еще одним преимуществом серии DSC является вертикальная работа. В прошлом двигатели с тахогенератором были проблемой для вертикального перемещения. Причина в гравитации.
|
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. С увеличением скорости увеличивается напряжение тахогенератора. В серии DSC функция остановки при замедлении обеспечивает управляемое замедление с автоматическим электромагнитным торможением. |
 Это заставляет контроллер скорости думать, что двигатель вращается слишком быстро, таким образом снижая его напряжение, чтобы попытаться снизить скорость. Однако при снижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не будет исчерпан и нагрузка не упадет.
Это заставляет контроллер скорости думать, что двигатель вращается слишком быстро, таким образом снижая его напряжение, чтобы попытаться снизить скорость. Однако при снижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не будет исчерпан и нагрузка не упадет.Недостатком двигателей переменного тока с регулированием скорости с тахогенераторной обратной связью является то, что на низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента двигателя помечена, чтобы показать это. Убедитесь, что вы работаете ниже «линии безопасной работы». Типы комбинаций (мотор-редукторы) см. пунктирную линию «Допустимый крутящий момент для комбинированного типа».
Другими словами, чтобы избежать этой проблемы, используйте мотор-редуктор.