Содержание
17 часто задаваемых вопросов о преобразователе частоты и электродвигателе — Статьи
Дата публикации: 21.08.2019
В данной статье мы подобрали для вас ответы на наиболее часто задаваемые вопросы по работе электродвигателей и частотных преобразователей.
1. Что такое электромеханический привод?
Ответ: Электромеханический привод – это система, состоящая из электродвигателя, механического передаточного устройства, электрического силового преобразователя и электронного устройства управления, осуществляющая управляемое преобразование электрической энергии в энергию движения механического объекта.
2. Что такое преобразователь частоты?
Ответ: Преобразователь частоты – это устройство для управляемого питания электродвигателя.
3. В чем заключается назначение преобразователя частоты?
Ответ: Назначение преобразователя частоты – это управление моментом/скоростью вращения электродвигателя за счет изменения частоты и напряжения питания.
4. Что такое ШИМ?
Ответ: ШИМ (Широтно импульсная модуляция) – это метод получения регулируемого выходного напряжения путем изменения длительности коммутации.
5. Как согласуется выходное напряжение ПЧ с входным?
Ответ: Выходное напряжение может меняться от 0 до уровня входного напряжения ПЧ (возможна перегрузка в несколько процентов). Соответственно при питании ПЧ от сети 220В не возможно развить номинальный момент на двигателе подключенным по схеме питания 380В.
6. Как согласуется выходная частота ПЧ с номинальной входной?
Ответ: Выходная частота формируется посредством ШИМ и может меняться в диапазоне от 0 до 400 -590 Гц (в зависимости от модели ПЧ). В зависимости от выходной частоты ПЧ меняется скорость вращения вала двигателя.
7. Возможно ли управлять ПЧ однофазными двигателями?
Ответ: Нет.
8. Возможно ли управлять ПЧ с однофазным питанием, трехфазными двигателями?
Возможно ли управлять ПЧ с однофазным питанием, трехфазными двигателями?
Ответ: Да, до 2,2 кВт.
9. Основные плюсы использования преобразователей частоты?
Ответ: Их 2. Во-первых, экономия электроэнергии при работе электродвигателя. Во-вторых, реализация сложных технологических процессов за счет изменения частоты вращения приводов.
10. Какой принцип работы асинхронного двигателя с короткозамкнутым ротором?
Ответ: ПЧ создает вращающееся магнитное поле в статоре, а оно создает электрическое поле в короткозамкнутом роторе (принцип магнитной индукции). Происходит взаимодействие между полями ротора и статора. Поле ротора стремится вращаться также как поле статора, тем самым ротор приходит во вращение.
11. От чего зависит номинальная скорость вращения ротора асинхронного двигателя с короткозамкнутым ротором?
Ответ: Она зависит от частоты питающего напряжения и количества пар полюсов и скольжения. Преобразователь частоты позволяет регулировать частоту питающего напряжения и тем самым скорость вращения вала ЭД.
Преобразователь частоты позволяет регулировать частоту питающего напряжения и тем самым скорость вращения вала ЭД.
12. Какое значение имеет скорость вращения вала электродвигателя при его работе от сети?
Ответ: Скорость равна номинальной частоте двигателя.
13. Какова скорость вращения вала электродвигателя при его работе от ПЧ?
Ответ: Скорость регулируется от ПЧ .
14. Как связан момент с током электродвигателя?
Ответ: Для двигателя с постоянными магнитами момент пропорционален току статора. Для асинхронных двигателей зависимость между током и моментом нелинейная, но в рабочей зоне рост тока приводит к росту момента.
15: Какие существуют способы подключения обмоток двигателя?
Ответ: Треугольник, Звезда (изменяется номинальное напряжение и ток двигателя).
16: При подключении в звезду или треугольник будет больше номинальное линейное напряжение двигателя?
Ответ: Линейное напряжение будет больше для звезды (соответственно ток наоборот меньше).
17: Что такое скольжение?
Ответ: Скольжение – это разница между скоростью поля статора и частотой вращения ротора в процентах.
Смотрите так же:
Функция «Спящий режим» преобразователя частоты Danfoss FC-051 (Реализация на встроенном контроллере)
Управление частотным преобразователем Danfoss серии FC51 с панели оператора Weintek MT8121XE1WK
Для заказа преобразователя частоты перейдите в каталог по ссылке — VLT Micro Drive
Изменение скорости вращения путем изменения первичного напряжения и другие
- Подробности
- Категория: Электрические машины
- электродвигатель
Содержание материала
- Общие сведения об электрических машинах
- Нагрев вращающихся машин переменного тока
- Номинальные режимы работы
- Конструктивные исполнения электрических машин
- Регулирование скорости вращения трехфазных асинхронных двигателей
- Изменение скорости вращения путем изменения первичного напряжения и другие
- Работа трехфазного асинхронного двигателя в неноминальных условиях
- Синхронные машины
- Неявнополюсные синхронные генераторы
- Системы возбуждения синхронных генераторов
- Машины постоянного тока
- Коллекторные машины постоянного тока
- Устройство и конструкция коллекторной машины постоянного тока
- Обмотки барабанных якорей
- Петлевые обмотки барабанных якорей
- Волновые обмотки барабанных якорей
- Комбинированная обмотка машин постоянного тока и выбор
- Характеристики генераторов постоянного тока
- Генератор смешанного возбуждения
- Сельсины
- Работа однофазных сельсинов в индикаторном режиме
- Поворотные трансформаторы
- Синхронные реактивные двигатели
- Однофазные реактивные двигатели
- Синхронный гистерезисный двигатель
Страница 6 из 25
Скорость вращения двигателя можно регулировать путем изменения (уменьшения) напряжения на его зажимах. Это основано на зависимости M = f(s) (185), которую, предполагая постоянными параметры двигателя и неизменной частоту приложенного напряжения в пределах по s<sKр, можно записать в виде M = c1U1s. Отсюда следует, что при постоянном моменте па валу двигателя скольжение s меняется при изменении напряжения в соответствии с зависимостью
Это основано на зависимости M = f(s) (185), которую, предполагая постоянными параметры двигателя и неизменной частоту приложенного напряжения в пределах по s<sKр, можно записать в виде M = c1U1s. Отсюда следует, что при постоянном моменте па валу двигателя скольжение s меняется при изменении напряжения в соответствии с зависимостью
На рисунке 176 даны кривые вращающих моментов двигателя при различных значениях первичного напряжения; если скольжение s1 соответствует работе двигателя при напряжении.
Рис. 176. Механические характеристики асинхронного двигателя при различных величинах напряжения.
Как видно, диапазон регулирования скорости вращения, равной (1—s), весьма невелик. Расширение диапазона регулирования получается при более пологих механических характеристиках, то есть в двигателях с большим значением sK. Но следует помнить, что потери, возникающие во вторичной цепи, равны мощности скольжения [см. формулу (159)]. К недостаткам относится также и то, что при
снижении напряжения пропорционально его квадрату падает перегрузочная способность двигателя.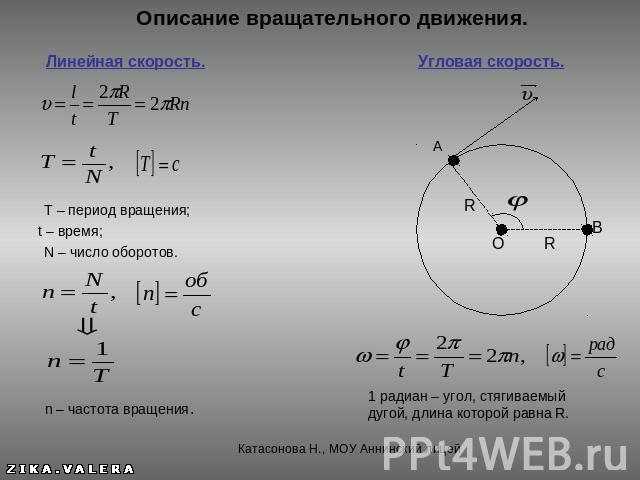 К достоинствам этого способа относятся возможность применения его к короткозамкнутым двигателям, плавное регулирование скорости вращения, простота и надежность в работе. Напряжение на зажимах двигателя при неизменном напряжении сети изменяют при помощи установленных между сетью и статором двигателя регулируемого автотрансформатора или управляемых дросселей насыщения. При изменении значения постоянного тока подмагничивания индуктивное сопротивление дросселей изменяется, что вызывает изменение напряжения на зажимах двигателя.
К достоинствам этого способа относятся возможность применения его к короткозамкнутым двигателям, плавное регулирование скорости вращения, простота и надежность в работе. Напряжение на зажимах двигателя при неизменном напряжении сети изменяют при помощи установленных между сетью и статором двигателя регулируемого автотрансформатора или управляемых дросселей насыщения. При изменении значения постоянного тока подмагничивания индуктивное сопротивление дросселей изменяется, что вызывает изменение напряжения на зажимах двигателя.
Ухудшение охлаждения самовентилируемых двигателей при снижении скорости вращения приводит к необходимости повышать номинальную мощность двигателя (увеличивать габарит регулируемого двигателя по сравнению с нерегулируемым). Степень завышения мощности зависит от формы механической характеристики двигателя (ее пологости в области рабочих режимов), вида статической нагрузки и диапазона регулирования.
Выбор электродвигателя по мощности, дросселей насыщения или автотрансформатора для регулируемого привода представляет собой самостоятельный вопрос, рассматриваемый в курсах электропривода и в периодической литературе.
Способы регулирования скорости вращения изменением напряжения перспективны прежде всего для приводов с вентиляторной характеристикой момента, механизма или постоянным моментом, но при малом диапазоне регулирования. Такие приводы достаточно распространены в сельскохозяйственном производстве.
Метод регулирования скорости вращения изменением напряжения применяется также для двигателей с фазным ротором, причем в этом случае для получения более пологих механических характеристик двигателя в цепь ротора включают добавочные сопротивления.
Рассмотренные способы регулирования скорости вращения можно отнести к наиболее распространенным. Из возможных других можно назвать способ регулирования скорости вращения двигателя с фазным ротором при включении в цепь ротора индуктивных сопротивлений, наглухо присоединенных к цепи ротора и размещенных на одном валу с ним (двигатель Розова, рис. 178), а также способ импульсного регулирования. При импульсном регулировании непрерывно включают двигатель в сеть и отключают его от сети или при помощи контактора К шунтируют сопротивления, включенные между сетью и статором двигателя (рис. 179).
179).
Рис. 178. Двигатель с индуктивными сопротивлениями в роторе:
а — электрическая схема; б — внешний вид; в — конструкция индуктивного сопротивления; 1 — катушка; 2 — корпус диска; 3 — крышка.
Рис. 179. Схема импульсного регулирования скорости вращения асинхронного двигателя.
В зависимости от частоты и продолжительности импульсов двигатель работает с некоторой приблизительно постоянной скоростью вращения. Регулирование сопряжено с ухудшением энергетических показателей, сопровождается толчками токов и применяется только для двигателей весьма малой мощности.
- Назад
- Вперёд
- Назад
- Вперёд
- Вы здесь:
- Главная
- Оборудование
- Требования безопасности при обслуживании электродвигателей
 org/ListItem»> Эл. машины
org/ListItem»> Эл. машины
Еще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
Что определяет скорость вращения двигателя?
- Дом
- Блог
- Что определяет скорость вращения двигателя?
Электродвигатели отличаются своим разнообразием и широким диапазоном типоразмеров. Существуют двигатели с дробной мощностью (л.с.) для небольших бытовых приборов и двигатели мощностью в тысячи л.с. для тяжелого промышленного использования. Другие характеристики, указанные на паспортных табличках двигателей, включают их входное напряжение, номинальный ток, энергоэффективность и скорость в об/мин.
Скорость вращения электродвигателя зависит от двух факторов: его физической конструкции и частоты (Гц) питающего напряжения. Инженеры-электрики выбирают скорость двигателя в зависимости от потребностей каждого приложения, подобно тому, как механическая нагрузка определяет требуемую мощность.
Убедитесь, что в вашем здании есть подходящий электродвигатель для каждого применения.
Как частота напряжения связана со скоростью двигателя
В зависимости от страны источник питания будет иметь частоту 60 Гц или 50 Гц. Хотя трехфазный двигатель будет вращаться с обоими источниками питания, могут возникнуть проблемы с производительностью, если двигатель указан для одной частоты, а используется для другой.
Поскольку источник питания с частотой 60 Гц переключает полярность на 20 % быстрее, чем источник питания с частотой 50 Гц, двигатель, рассчитанный на 50 Гц, будет вращаться с частотой вращения на 20 % выше. Крутящий момент двигателя остается относительно постоянным, а более высокая скорость приводит к более высокой мощности на валу. Двигатель также выделяет больше тепла, но охлаждающий вентилятор также ускоряется вместе с валом, помогая отводить лишнее тепло. Двигатель также имеет тенденцию потреблять больше реактивного тока, что снижает его коэффициент мощности.
Двигатель также выделяет больше тепла, но охлаждающий вентилятор также ускоряется вместе с валом, помогая отводить лишнее тепло. Двигатель также имеет тенденцию потреблять больше реактивного тока, что снижает его коэффициент мощности.
Подключение двигателя 60 Гц к источнику питания 50 Гц — более деликатный вопрос. Снижение скорости при том же напряжении может привести к насыщению магнитопровода двигателя, увеличению тока и перегреву устройства. Самый простой способ предотвратить насыщение — снизить входное напряжение, и в идеале отношение В/Гц должно оставаться постоянным:
.
- Двигатель с частотой 60 Гц, работающий на частоте 50 Гц, работает на частоте 83,3 % от номинальной.
- Чтобы сохранить постоянное отношение В/Гц, входное напряжение также должно быть снижено до 83,3%.
- Если электродвигатель нормально работает при 240 В и 60 Гц, входное напряжение при 50 Гц должно быть 200 В, чтобы сохранить соотношение 4 В/Гц.
Электропроводка двигателя и количество полюсов
Постоянный магнит имеет два полюса, но двигатели могут быть подключены таким образом, чтобы их магнитное поле имело большее количество полюсов. Двухполюсный двигатель совершает полный оборот с одной сменой полярности, в то время как четырехполюсный двигатель поворачивается только на 180° с одним переключателем полярности. Чем больше полюсов, тем ниже скорость двигателя: если все остальные факторы равны, 4-полюсный двигатель будет вращаться с половиной скорости 2-полюсного двигателя.
Двухполюсный двигатель совершает полный оборот с одной сменой полярности, в то время как четырехполюсный двигатель поворачивается только на 180° с одним переключателем полярности. Чем больше полюсов, тем ниже скорость двигателя: если все остальные факторы равны, 4-полюсный двигатель будет вращаться с половиной скорости 2-полюсного двигателя.
- Источник питания частотой 60 Гц меняет полярность 60 раз в секунду, а двухполюсный двигатель будет вращаться со скоростью 3600 об/мин при подключении к этому источнику. Четырехполюсный двигатель будет вращаться только со скоростью 1800 об/мин.
- Для двигателей 50 Гц скорость составляет 3000 об/мин с 2 полюсами и 1500 об/мин с 4 полюсами.
Концепцию можно обобщить следующим уравнением:
Используя это уравнение, 4-полюсный двигатель с частотой 60 Гц имеет скорость 1800 об/мин, а 6-полюсный двигатель с частотой 50 Гц имеет скорость 1000 об/мин. Однако на самом деле это скорость магнитного поля, называемая синхронной скоростью, которая не всегда равна скорости вращения вала.
- В синхронном двигателе , ротор использует постоянный магнит или электромагнит для вращения с расчетной скоростью.
- С другой стороны, асинхронный двигатель будет работать немного ниже расчетной скорости вращения. Так работает электромагнитная индукция, и это не следует рассматривать как неисправность.
Если электродвигатель имеет паспортную скорость 1800 об/мин, можно сделать вывод, что агрегат представляет собой 4-х полюсный синхронный двигатель, рассчитанный на 60 Гц. С другой стороны, если скорость, указанная на паспортной табличке, меньше, например 1760 об/мин, агрегат является асинхронным двигателем.
Преобразователь частоты может управлять скоростью двигателя, регулируя входную частоту, как следует из его названия. ЧРП также может модулировать напряжение, чтобы поддерживать соотношение В/Гц ниже точки насыщения магнитного сердечника. Благодаря этой функции частотно-регулируемый привод не повреждает двигатель, даже если скорость снижается ниже значения, указанного на паспортной табличке. Основным недостатком частотно-регулируемых приводов является возникновение гармонических искажений, поскольку они являются нелинейными нагрузками, но это можно компенсировать с помощью фильтров гармоник.
Основным недостатком частотно-регулируемых приводов является возникновение гармонических искажений, поскольку они являются нелинейными нагрузками, но это можно компенсировать с помощью фильтров гармоник.
Электрическая конструкция делает ваше здание более безопасным и снижает расходы на электроэнергию. Компания NY Engineers реализовала более 1000 проектов, и вы можете отправить электронное письмо по адресу [email protected] или позвонить по телефону (786) 788-029.5212-575-5300.
Теги :
Электротехника
Выбор двигателя
Электродвигатель
VFD
Поиск
Наши услуги
Следуйте за нами
Нужна помощь?
Позвоните нам сейчас
(786) 788-0295
(212) 575-5300
Присоединяйтесь к более чем 15 000 коллег-архитекторов и подрядчиков
Получайте советы от экспертов по инженерным вопросам прямо на свой почтовый ящик. Подпишитесь на блог инженеров Нью-Йорка ниже.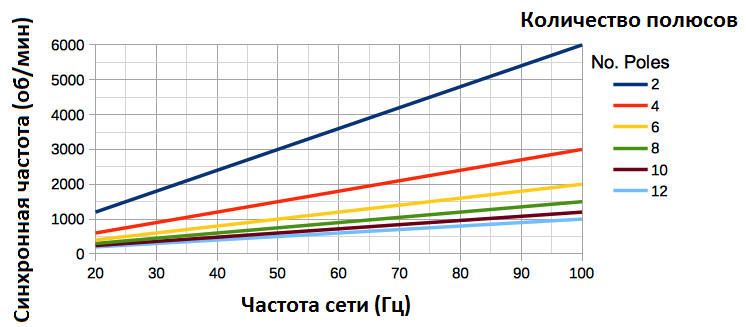
© 2022 Nearby Engineers New York Engineers. Все права защищены. Правовая информация | Товарные знаки
Частота и генераторы переменного тока – тригонометрия и генерация однофазного переменного тока для электриков
Генерация переменного тока
В предыдущей главе мы узнали, что термин цикл означает от точки сигнала до точки, в которой сигнал начинает повторяться. Когда мы обсуждаем термин частота , мы имеем в виду, сколько циклов может произойти в одну секунду. Частота измеряется в герц (привет Генриху Герцу) или CPS (циклов в секунду). На частоту генератора влияют два фактора: скорость вращения и количество полюсов.
Рисунок 52. Цикл синусоиды
Когда якорь вращается в поле, он начинает создавать форму волны (как мы видели в предыдущей главе). Один полный механический оборот якоря создает одну полную синусоиду на двухполюсном генераторе переменного тока. Если двухполюсный генератор делает три полных оборота за одну секунду, он создаст за эту секунду три полных синусоидальных колебания. Мы бы сказали, что частота составляет три цикла в секунду или три герца (как говорят крутые ребята).
Если двухполюсный генератор делает три полных оборота за одну секунду, он создаст за эту секунду три полных синусоидальных колебания. Мы бы сказали, что частота составляет три цикла в секунду или три герца (как говорят крутые ребята).
Скорость вращения машины измеряется в оборотах в минуту или об/мин . Однако при работе с частотой нас интересуют не минуты, а скорее секунды. Следовательно, RPM необходимо преобразовать в обороты в секунду ( RPS ). Поскольку в минуте 60 секунд, все, что нам нужно сделать, это разделить RPM на 60, чтобы преобразовать его в RPS.
Например, если якорь двухполюсного генератора переменного тока вращается со скоростью 1800 об/мин, мы можем сказать, что он вращается со скоростью 30 оборотов в секунду. Если этот генератор переменного тока имеет два полюса, то за одну секунду он будет генерировать 30 циклов напряжения. Тогда можно было бы сказать, что он имеет частоту 30 циклов в секунду или 30 герц. Частота генератора прямо пропорциональна скорости вращения генератора.
Если мы добавим полюсов к генератору, мы сможем изменить частоту. В двухполюсном генераторе переменного тока сторона А якоря (показанная на рис. 53) проходит с севера на юг, а затем с юга на север, создавая одну полную синусоиду. Если мы добавим еще два полюса, как показано на рис. 54, то сторона А якоря пройдет мимо двух северных и двух южных полюсов за один полный механический оборот.
Рис. 53. Двухполюсный генератор переменного тока
Две полные синусоидальные волны создаются за один полный механический оборот. Если двухполюсный генератор создает один цикл напряжения за одну секунду (или один герц частоты), то четырехполюсный генератор создает два цикла напряжения за одну секунду (или два герца).
Частота генератора прямо пропорциональна количеству полюсов генератора.
Рисунок 54. Четырехполюсный генератор
Зная, что скорость вращения прямо пропорциональна частоте и что количество полюсов прямо пропорционально частоте, мы можем использовать формулу.