Содержание
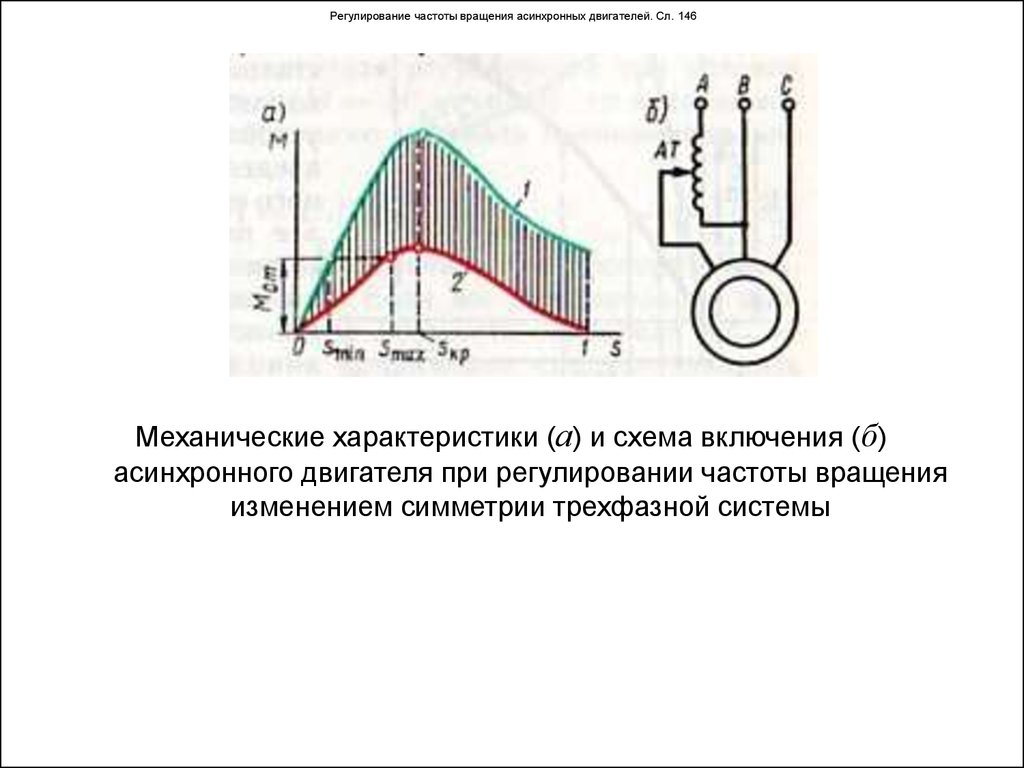
§81. Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис.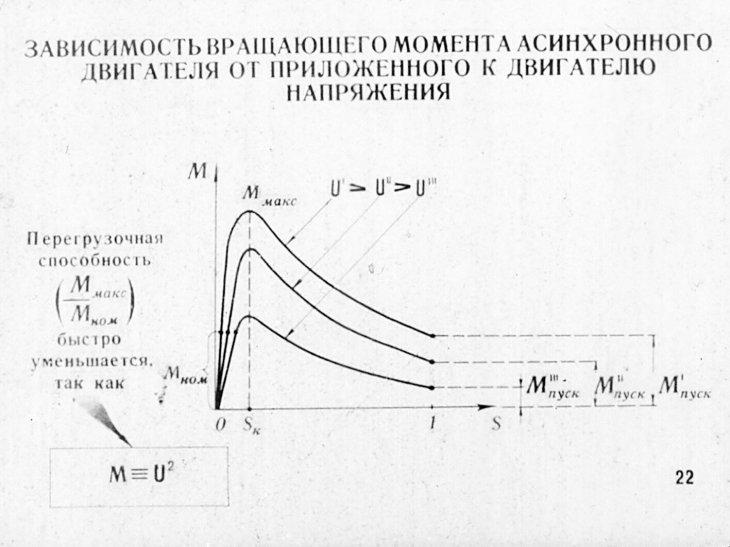 269,б). Такое переключение можно осуществить обычным переключателем.
269,б). Такое переключение можно осуществить обычным переключателем.
Регулирование частоты вращения асинхронного двигателя
Общие сведения. Технологический процесс часто требует изменения частоты вращения исполнительного механизма. С этой целью широко применяются коробки скоростей, которые усложняют кинематику провода, вызывают вибрацию системы и увеличивают инерционность привода. Для повышения точности обработки и увеличения производительности целесообразно использовать регулировочные свойства двигателей. В асинхронных двигателях частота вращения определяется из равенства
где n1 = 60f 1 / р.
Из этого равенства следует, что изменять п можно тремя способами: изменением частоты f1 , числа пар полюсов р и скольжения s. Частоту вращения ротора в принципе можно регулировать изменением напряжения питания U1. Однако с увеличением U1 появляется опасность превышения допустимой температуры нагрева двигателя, а с уменьшением U1 уменьшается перегрузочная способность двигателя.
Частоту вращения ротора в принципе можно регулировать изменением напряжения питания U1. Однако с увеличением U1 появляется опасность превышения допустимой температуры нагрева двигателя, а с уменьшением U1 уменьшается перегрузочная способность двигателя.
Регулирование изменением частоты (частотное регулирование). Этим способом изменение частоты вращения ротора п осуществляется за счет изменения частоты питающего напряжения f1. Это возможно потому, что скольжение в номинальном режиме составляет всего 2—8 %.
Для изменения частоты f1 могут применяться машинные и полупроводниковые (тиристорные) преобразователи.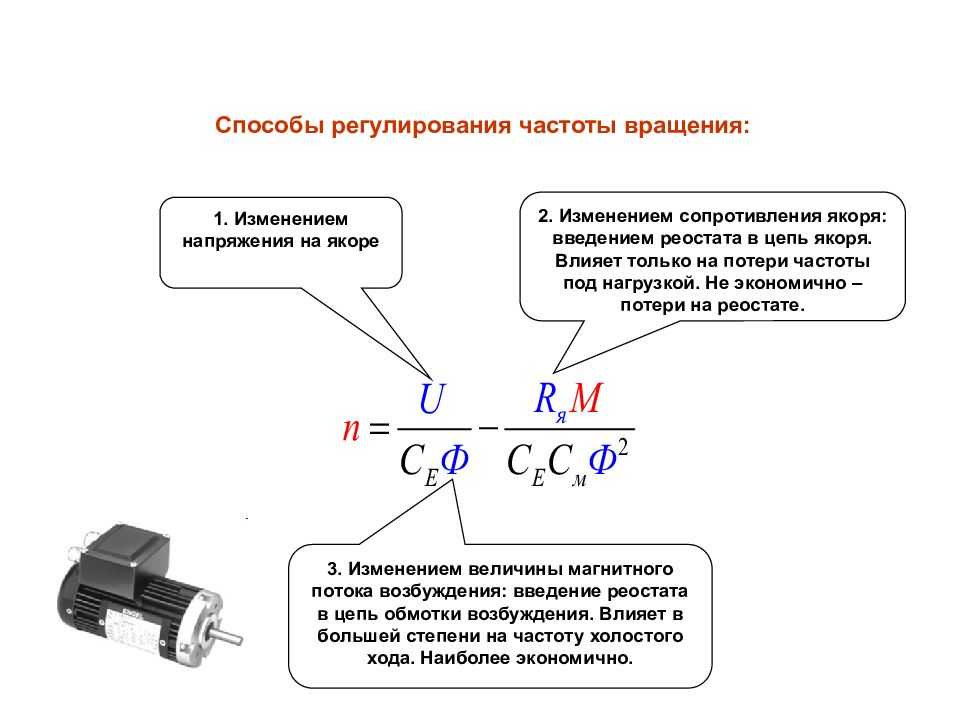 На рис. 3.36 показана схема машинного преобразователя. Асинхронный двигатеь АД с постоянной частотой вращает генератор постоянного тока Г, работающий в системе генератор — двигатель. Генератор Г питает двигатель Д постоянного тока, частота вращения которого регулируется током возбуждения генератора Г и двигателя Д.
На рис. 3.36 показана схема машинного преобразователя. Асинхронный двигатеь АД с постоянной частотой вращает генератор постоянного тока Г, работающий в системе генератор — двигатель. Генератор Г питает двигатель Д постоянного тока, частота вращения которого регулируется током возбуждения генератора Г и двигателя Д.
Двигатель вращает с различными частотами синхронный генератор СГ, частота выходного напряжения которого f1 = n1p/60 изменяется. В результате АД изменяет частоту вращения рабочего механизма. Этот способ позволяет плавно изменять частоту вращения АД. Недостатками способа являются высокая стоимость преобразователя, низкий КПД установки из-за многократного преобразования энергии, сравнительно небольшой диапазон регулирования.
Частотное тиристорное регулирование. Значительно больший эффект при частотном регулировании достигается применением тиристорных преобразователей. На рис. 3.37 показана схема такого регулирования. Тиристорный преобразователь ТП питается от трехфазной сети с постоянными значениями напряжения U1 и частоты f1.
На рис. 3.37 показана схема такого регулирования. Тиристорный преобразователь ТП питается от трехфазной сети с постоянными значениями напряжения U1 и частоты f1.
На выходе преобразователя получается постоянное варьируемое напряжение U1c. Это напряжение подается на блок инвертора И, на выходе которого появляется регулируемое переменное напряжение U1v при частоте f1v. Напряжение U1v подается на асинхронный двигатель АД.
Для автоматизации процесса регулирования необходимо дополнительно иметь блок задания частоты БЗЧ и блоки управления напряжением УН и частотой УЧ.
Для поддержания точного значения скорости целесообразно иметь обратную связь по частоте с выхода АД на блок задания частоты.
Регулирование изменением числа полюсов.
Асинхронный двигатель не имеет явно выраженных полюсов и поэтому его число полюсов зависит от схемы соединения катушек в обмотках каждой фазы статора.
Если, например, обмотка фазы состоит из двух катушек, то при их последовательном соединении число пар полюсов р = 2, а при параллельном соединении р = 1. Начала и концы катушек выводятся на клеммы щитка, так что переключение катушек можно делать на работающем двигателе. Можно разместить в пазах статора две независимые обмотки, каждая из которых создает разное число пар полюсов, например, р = 1 и р = 2.
Одна из обмоток может, например, соединяться в одинарную звезду, а другая – в двойную звезду (рис. 3.38, а и б). Можно также переключать треугольник в двойную звезду (рис. 3.39, а и б).
3.38, а и б). Можно также переключать треугольник в двойную звезду (рис. 3.39, а и б).
В результате двигатель будет трехскоростной. В принципе можно разместить на статоре две обмотки, каждая из которых имеет две скорости, такая машина будет четырехскоростной. Однако размещение нескольких обмоток увеличивает габариты и стоимость машины. Поэтому лучше применять одну обмотку с переключением на четыре скорости. При этом можно получить синхронные скорости 3000 / 1500 / 1000 / 500 или 1500 / 1000 / 750 / 500 об/мин или другие комбинации.
Регулирование изменением числа полюсов является ступенчатым регулированием. Механические характеристики при разном числе пар полюсов показаны на рис. 3.40. Этот способ регулирования экономичен, рабочая часть характеристик жесткая, но данный способ применяется лишь в случаях, не требующих плавного регулирования, например в станках, где ступенчатое регулирование применяется с целью уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.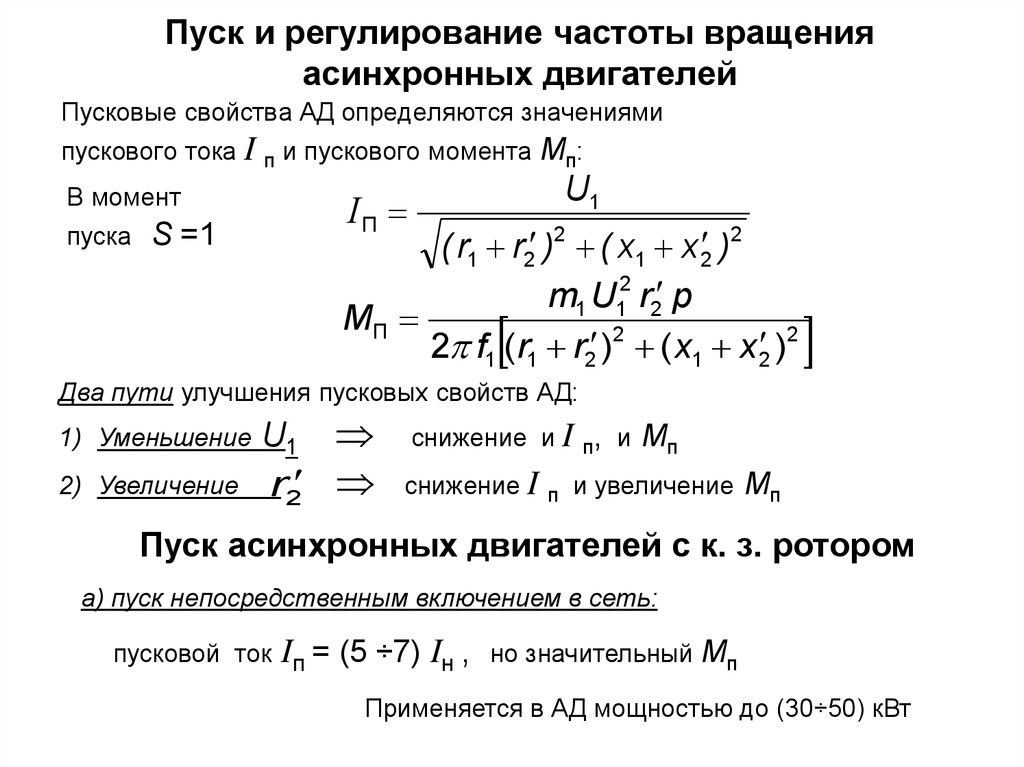
Регулирование частоты вращения изменением подводимого напряжения. При уменьшении напряжения U момент двигателя уменьшается пропорционально U2. В связи с этим изменяются механические характеристики, уменьшается критический момент Mк , при постоянном моменте сопротивления увеличивается скольжение и уменьшается частота вращения ротора.
Уменьшать напряжение U можно включением в цепь статора реостатов (рис. 3.41, а), автотрансформаторов (рис. 3.41,6) или регулируемых дросселей (рис. 3.41, в). При включении реостатов в них теряется значительная мощность (RI2).
Автотрансформаторы дают возможность регулировать частоту вращения лишь вручную.
Регулируемые дроссели позволяют автоматизировать этот процесс, для чего их цепь
подмагничивания включается в систему автоматического регулирования.
Данный метод применяется только у двигателей малой мощности, так как при этом способе регулирования уменьшается КПД двигателя, уменьшается критический момент, а диапазон регулирования сравнительно небольшой.
Регулирование изменением сопротивления цепи ротора R2 (реостатное регулирование). Этот способ применим только для двигателей с фазным ротором. Такое регулирование связано с изменением скольжения s в соответствии с зависимостью п = п1 (1 — s).
Из формул ( 3.26) и ( 3.28) следует, что с увеличением R2 угол наклона механической характеристики увеличивается, а критический момент остается постоянным (Mк = const).
На рис. 3.42 представлено семейство характеристик п(М) при различных R2 . Если момент нагрузки Mc = const, то частота вращения n с увеличением R2 падает, а скольжение увеличивается.
Этот способ регулирования имеет ряд недостатков: дополнительные потери энергии в реостате, механические характеристики становятся мягкими, относительно малый диапазон регулирования.
Formula & Methods [GATE Notes]
Серия испытаний
Автор: Aina Parasher|Обновлено: 7 ноября 2022 г. Однако скорость асинхронного двигателя может изменяться за счет изменения его синхронной скорости и скольжения. Для асинхронного двигателя с короткозамкнутым ротором скорость можно регулировать только через статор, но для асинхронного двигателя с контактными кольцами его скорость можно регулировать через статор и его ротор.
Управление скоростью асинхронного двигателя PDF [Примечания GATE]
Управление скоростью асинхронного двигателя осуществляется за счет потери эффективности и низкого коэффициента мощности. Здесь мы подробно рассмотрим управление скоростью асинхронного двигателя и обсудим различные методы управления скоростью, которые можно использовать.
Содержание
- 1. Управление скоростью асинхронного двигателя
- 2. Методы управления скоростью асинхронного двигателя
- 3. Метод управления напряжением
- 4. Метод управления частотой
- 5. Управление скоростью переключения полюсов
- 6. Метод управления сопротивлением статора
- 7. Метод управления сопротивлением ротора
- 8. Метод восстановления мощности скольжения
- 9. Каскадное или тандемное соединение считывания
 Управление скоростью асинхронного двигателя
Управление скоростью асинхронного двигателя
6
9000 Полная статья
Регулирование скорости асинхронного двигателя
Регулирование скорости асинхронного двигателя осуществляется для изменения токов в асинхронном двигателе для управления скоростью. Выражение для скорости (N) асинхронного двигателя равно
N=N с (1−с)
Следовательно, мы можем получить контроль над скоростью, изменяя ее синхронную скорость (N с ) или изменяя ее скольжение (с). Синхронная скорость асинхронного двигателя зависит от частоты питания и числа полюсов статора. Крутящий момент асинхронного двигателя во время работы определяется выражением
Крутящий момент асинхронного двигателя во время работы определяется выражением
T=[3×60/2πN с ]×sE 2 2 R 2 /R 2
5 2
) 2
Следовательно, для данного крутящего момента и нагрузки мы можем изменять напряжение и сопротивление ротора, чтобы изменять скольжение для управления скоростью асинхронного двигателя.
Методы управления скоростью асинхронного двигателя
Со стороны статора мы можем получить управление скоростью асинхронного двигателя, используя следующие методы, а именно.
- Метод управления напряжением
- Метод управления частотой
- Метод переключения полюсов
- Метод сопротивления статора
Со стороны ротора регулирование скорости асинхронного двигателя может быть достигнуто следующими методами.
- Метод управления сопротивлением ротора
- Метод рекуперации мощности скольжения
- Каскадное (или) тандемное соединение
Кратко обсудим эти методы управления скоростью асинхронного двигателя.
Метод управления напряжением
В этом методе управления скоростью асинхронного двигателя напряжение питания изменяется с помощью автотрансформатора. Практически мы не можем увеличить уровни напряжения сверх номинального напряжения, так как напряжение изоляции увеличится и приведет к повреждению изоляции.
T=[3×60/2πN s ]×sE 2 2 R 2 /R 2 2 +(sX 2 ) 2
During running, the скольжение крошечное; следовательно, (sX 2 ) 2 можно пренебречь
⇒T 𝛼 sE 2 2
А ЭДС, индуцируемая в роторе, пропорциональна напряжению
⇒T 𝛼 sV 2 2
Из приведенного выше уравнения видно, что крутящий момент также падает при снижении напряжения питания. Если напряжение уменьшается для данной нагрузки, скольжение будет увеличиваться при снижении скорости, чтобы поддерживать постоянный крутящий момент нагрузки.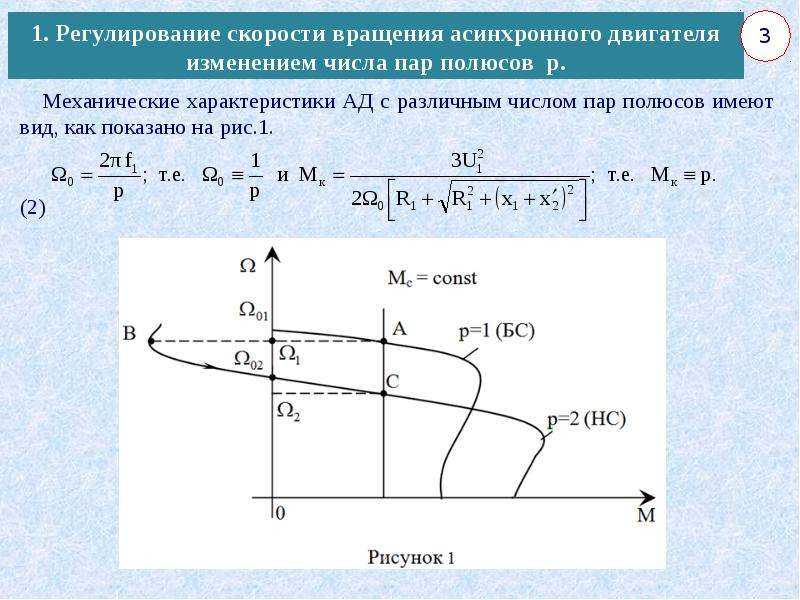 Напряжение можно уменьшить до подходящего значения; двигатель станет нестабильным, если мы уменьшим напряжение ниже этого значения. Этот тип управления скоростью асинхронного двигателя используется редко, так как приводит к перегреву асинхронного двигателя, поскольку незначительное изменение скорости требует значительного снижения напряжения.
Напряжение можно уменьшить до подходящего значения; двигатель станет нестабильным, если мы уменьшим напряжение ниже этого значения. Этот тип управления скоростью асинхронного двигателя используется редко, так как приводит к перегреву асинхронного двигателя, поскольку незначительное изменение скорости требует значительного снижения напряжения.
Метод управления частотой
Плотность потока сердечника статора обратно пропорциональна применяемой частоте. Чтобы уменьшить потери в сердечнике и улучшить работу двигателя, максимальная плотность потока (B m ) должна поддерживаться постоянной.
B m 𝛼 V/f
Таким образом, чтобы поддерживать максимальную плотность потока постоянной, мы должны изменять напряжение и частоту. Этот метод невозможен для частот выше номинальной частоты, поскольку необходимо также увеличить напряжение, что невозможно из-за ограничений по изоляции. Этот метод требует преобразователей переменного напряжения и переменной частоты, что делает этот метод дорогостоящим. Тем не менее, этот метод предлагает широкий диапазон регулирования скорости, не влияя на КПД двигателя.
Тем не менее, этот метод предлагает широкий диапазон регулирования скорости, не влияя на КПД двигателя.
Управление скоростью переключения полюсов
Этот метод управления скоростью асинхронного двигателя может применяться только к асинхронному двигателю с короткозамкнутым ротором. Число полюсов в роторе асинхронного двигателя с контактными кольцами фиксировано, тогда как ротор с короткозамкнутым ротором может быть адаптирован к любому числу полюсов. Полюса асинхронного двигателя можно менять двумя способами.
- Несколько наборов обмоток
- Последовательная смена полюсов
В первом методе мы используем несколько наборов обмоток статора, предназначенных для разных наборов полюсов. Во время работы любой из них может быть подключен в соответствии с требованиями скорости пользователя, а другие наборы останутся открытыми. Мы знаем, что
N s =120f/P
По мере увеличения числа полюсов скорость будет уменьшаться. Этот метод может изменять скорость только ступенчато, и он требует больших затрат, поскольку включает несколько обмоток статора.
Этот метод может изменять скорость только ступенчато, и он требует больших затрат, поскольку включает несколько обмоток статора.
В методе последовательной смены полюсов мы можем получить другой набор полюсов, поменяв местами катушки. Этот метод может дать только два набора скоростей.
Этот метод управления скоростью асинхронного двигателя аналогичен методу управления напряжением. Он требует последовательного включения трех реостатов с каждой фазой обмотки статора для снижения напряжения и достижения требуемой скорости. Поскольку из-за реостатов возникают некоторые потери мощности, этот метод будет предпочтительнее для машин с низким номиналом в течение небольшой продолжительности. Этот метод более выгоден при пуске, чем регулирование скорости.
Метод управления сопротивлением ротора
Этот метод управления скоростью асинхронного двигателя возможен только для асинхронного двигателя с контактными кольцами, поскольку мы не можем получить доступ к ротору асинхронного двигателя с короткозамкнутым ротором. Этот метод подключает внешнее сопротивление к ротору через контактные кольца и щетки во время работы. Следовательно, это приводит к снижению крутящего момента.
Этот метод подключает внешнее сопротивление к ротору через контактные кольца и щетки во время работы. Следовательно, это приводит к снижению крутящего момента.
T=[3×60/2πN s ]×sE 2 2 R 2 /R 2 2 +(sX 2 ) 2
При заданном напряжении статора ЭДС, индуцируемая в роторе E 2 , постоянна, и во время работы скольжение незначительно; следовательно, (sX 2 ) 2 можно пренебречь.
⇒T 𝛼 s/R 2
Но для поддержания постоянного момента нагрузки скорость ротора будет уменьшаться, а скольжение увеличиваться. Поскольку рабочее скольжение увеличивается, этот метод неэффективен и непригоден для широкого круга приложений. Основное преимущество этого метода заключается в том, что пусковой момент увеличивается при добавлении внешнего сопротивления, но он также имеет существенные недостатки.
- Невозможно двигаться со скоростью выше обычной.
- Большие изменения скорости требуют больших значений сопротивления, однако добавление таких больших значений приведет к значительным потерям в меди и снижению эффективности схемы.
- Больше потерь в результате наличия сопротивления.
- Асинхронный двигатель с короткозамкнутым ротором не может работать с использованием этого метода.

Метод рекуперации мощности скольжения
В этом методе управления скоростью асинхронного двигателя внешнее напряжение подается на ротор через контактные кольца и щетки с частотой скольжения (sf) для получения установившегося крутящего момента. Это можно сделать двумя способами.
В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Мы знаем, что
T 𝛼 sE 2 2
Если напряжение ротора увеличить, крутящий момент увеличится; впоследствии скорость вращения ротора увеличится, а скольжение уменьшится.
Во втором способе уменьшаем напряжение в роторе, тогда момент уменьшится, скорость увеличится, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций.
Каскадное или тандемное соединение
В этом методе управления скоростью асинхронного двигателя нам нужны два асинхронных двигателя, один из которых представляет собой асинхронный двигатель с контактными кольцами, а другой представляет собой либо асинхронный двигатель с контактными кольцами, либо асинхронный двигатель с короткозамкнутым ротором. мотор. Обе машины будут механически соединены; первый двигатель представляет собой асинхронный двигатель с контактными кольцами, который питает второй двигатель через контактные кольца.
Скорость асинхронного двигателя с контактными кольцами
N S1 = 120 F/P 1
Скорость второго двигателя составляет
N S2 = 120S 1 F/P 2
В этом методе, это метод, это метод. возможный. Они
возможный. Они
- 120 F/P 1 +P 2 в кумулятивном каскаде
- 120 F/P 1 -P 2 в дифференциальном каскаде
- 120 F/P 1 44444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444444. 1 только рабочий)
- 120 f/P 2 (При работе только двигателя-2)
При дифференциальном каскадировании число полюсов обоих двигателей не должно быть одинаковым.
Часто задаваемые вопросы по управлению скоростью асинхронного двигателя
-
Какие существуют методы управления скоростью асинхронного двигателя?
Со стороны статора мы можем контролировать скорость, используя метод управления напряжением, метод управления сопротивлением, метод управления частотой и метод переключения полюсов. Со стороны ротора мы можем управлять скоростью, используя метод сопротивления ротора, метод рекуперации мощности скольжения и каскадное соединение.
-
Какими методами можно регулировать скорость асинхронного двигателя с короткозамкнутым ротором?
В асинхронном двигателе с короткозамкнутым ротором нет доступа к ротору, поэтому возможно только управление скоростью на основе статора, т. е. метод управления напряжением, метод управления сопротивлением, метод управления частотой и метод переключения полюсов.
-
Что такое метод переключения полюсов для управления скоростью в асинхронном двигателе?
Этот метод управления скоростью возможен двумя способами. Первый заключается в использовании нескольких наборов обмоток статора, в которых статор рассчитан на несколько наборов полюсов, поэтому мы можем соединить обмотку с набором полюсов, который соответствует нашим требованиям. Второй — последовательное изменение полюсов путем реверсирования катушек, поэтому мы можем получить еще одну другую скорость.
-
Что такое метод рекуперации мощности скольжения для регулирования скорости асинхронного двигателя?
В этом методе внешнее напряжение подается на ротор через контактные кольца и щетки с частотой скольжения (sf).
Это можно сделать двумя способами. В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Если напряжение ротора увеличивается, то крутящий момент будет увеличиваться, следовательно, скорость вращения ротора будет увеличиваться, а скольжение будет уменьшаться. Во втором способе мы уменьшаем напряжение в роторе, тогда уменьшится крутящий момент и, соответственно, увеличится скорость, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций. -
Почему метод управления скоростью с переключением полюсов невозможен для асинхронного двигателя с контактными кольцами?
В отличие от ротора с короткозамкнутым ротором ротор с контактными кольцами не может адаптироваться к смене полюсов в обмотке статора, так как при проектировании асинхронного двигателя с контактными кольцами полюса ротора проектируются такими же, как и у статора. 100305
Следите за обновлениями
Наши приложения
- BYJU’S Exam Prep: приложение для подготовки к экзамену
GradeStack Learning Pvt.
Ltd.Windsor IT Park, Tower — A, 2nd Floor,Sector 125, Noida,
Uttar Pradesh 201303
Электрические асинхронные двигатели — синхронная скорость
Синхронная скорость асинхронного электродвигателя определяется
- блок питания частота и
- количество полюсов в обмотке двигателя.
The synchronous speed can be calculated as:
n = f (2 / p) 60 (1)
where
n = shaft rotation speed (rev/min, об/мин)
f = частота электропитания (Гц, циклов/сек, 1/сек)
p = количество полюсов
Примечание — асинхронный двигатель никогда не достигнет своей синхронной скорости.
Если бы это было так, то ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между полем статора и ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничивается скоростью ниже синхронной скорости, а разница между синхронной скоростью и фактической скоростью называется скольжением.Пример — Синхронная скорость электродвигателя с двумя полюсами
На двигатель с двумя полюсами подается питание с частотой 50 Гц (1/с) . Скорость вращения можно рассчитать как
n = (50 1/с) (2 / 2) (60 с/мин)
= 3000 об/мин (1/мин)
скорость вращения при разных частотах и числе полюсов
Скорость вращения вала — n — (rev/min, rpm) Frequency
— f —
(Hz)Number of poles — p — 2 4 6 8 10 12 10 600 300 200 150 120 100 20 1200 600 400 300 240 200 30 1800 900 600 450 360 300 40 2400 1200 800 600 480 400 50 1) 3000 1500 1000 750 600 500 60 2) 3600 1800 1200 900 720 600 70 4200 2100 1400 1050 840 700 80 4800 2400 1600 1200 960 800 960 800 960 800 960 800 960 800 960 .

 Это можно сделать двумя способами. В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Если напряжение ротора увеличивается, то крутящий момент будет увеличиваться, следовательно, скорость вращения ротора будет увеличиваться, а скольжение будет уменьшаться. Во втором способе мы уменьшаем напряжение в роторе, тогда уменьшится крутящий момент и, соответственно, увеличится скорость, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций.
Это можно сделать двумя способами. В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Если напряжение ротора увеличивается, то крутящий момент будет увеличиваться, следовательно, скорость вращения ротора будет увеличиваться, а скольжение будет уменьшаться. Во втором способе мы уменьшаем напряжение в роторе, тогда уменьшится крутящий момент и, соответственно, увеличится скорость, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций. Ltd.Windsor IT Park, Tower — A, 2nd Floor,
Ltd.Windsor IT Park, Tower — A, 2nd Floor, Если бы это было так, то ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между полем статора и ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничивается скоростью ниже синхронной скорости, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Если бы это было так, то ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между полем статора и ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничивается скоростью ниже синхронной скорости, а разница между синхронной скоростью и фактической скоростью называется скольжением.